
HiFive1是一个Arduino兼容的开发套件,包括Freedom E310,这是业界第一个商用RISC-V SoC。
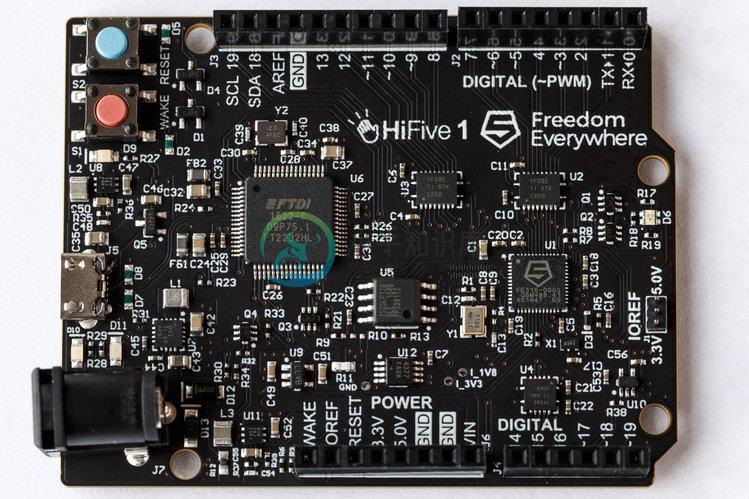
HiFive1特性和规格
微控制器:SiFive Freedom E310(FE310)
CPU:SiFive E31 CPU
架构:32位RV32IMAC
速度:320+ MHz
性能:1.61 DMIPs / MHz,2.73 Coremark / MHz
内存:16 KB指令高速缓存,16 KB数据暂存器
其他特性:硬件乘/除,调试模块,灵活的时钟生成与片上振荡器和PLL
工作电压:3.3 V和1.8 V.
输入电压:5 V USB或7-12 VDC插孔
IO电压:支持3.3 V或5 V
数字输入/输出引脚:19
PWM引脚:9
SPI控制器/硬件CS引脚:1/3
外部中断引脚:19
外部唤醒引脚:1
闪存:128 Mbit片外(ISSI SPI闪存)
主机接口(microUSB):程序,调试和串行通信
尺寸:68 mm x 51 mm
重量:22克
软件
Freedom E SDK
Arduino IDE支持
比较
HiFive1由Freedom E310驱动:
比Intel的Arduino 101快10倍的CPU时钟
比基于Cortex M0 +的Arduino Zero大了11倍多的Dhrystones
更高的功率效率在Dhrystone / mW
一个伟大的Arduino兼容开发工具包!
| HiFive1 | Arduino 101 | Arduino Zero | Arduino Uno | |
|---|---|---|---|---|
| Microcontroller | Freedom E310 | Intel Curie Module | Atmel ATSAMD21G18 | Atmel ATmega328P |
| Open-Source RTL? | Yes | No | No | No |
| CPU Speed | 320+ MHz | 32 MHz | 48 MHz | 16 MHz |
| Bits | 32-bit | 32-bit | 32-bit | 8-bit |
| CPU Core | SiFive E31 | Intel Quark SE | ARM Cortex M0+ | AVR |
| CPU ISA | RISC-V RV32IMAC | x86 | ARMv6-M | AVR |
| Performance | ||||
| DMIPs/MHz* | 1.61 | 1.3 | 0.93 | 0.30 |
| Total Dhrystones* | 515.2 | 41.6 | 44.64 | 5 |
| DMIPS/mW* | 3.16 | 0.35 | - | 0.10 |
| Board Specs | ||||
| IO Voltage | 3.3 V and 5 V | 3.3 V and 5 V | 3.3 V Only | 5 V Only |
| Digital IO | 19 | 14 | 14 | 14 |
| PWM | 9 | 4 | 10 | 6 |
| SRAM [kB] | 16 | 24 | 32 | 2 |
| Flash [kB] | 16384 | 196 | 256 | 32 |
| USB | Micro | Regular | 2 Micro | Regular |
* HiFive1在1.61 V,200 MHz操作下测量的DMIPs / mW。 英特尔Dhrystone数据和DMIPs / mW取自他们的数据表和产品材料。 Arduino Uno DMIPs / mW基于ATmega328P数据手册估计和这个网站。
-
RISC-V 指令集是基于精简指令集计算 RISC 原理建立的开放指令集架构,RISC-V 是在指令集不断发展和成熟的基础上建立的全新指令。RISC-V 指令集完全开源,设计简单,易于移植 Unix 系统,采用模块化设计,拥有完整的工具链,同时有大量的开源实现和流片案例。 特性 完全开源。对指令集使用,RISC-V 基金会不收取高额的授权费。开源采用宽松的 BSD 协议,企业完全自由免费使用,同时
-
labeled-RISC-V —— 标签化RISC-V项目 该项目基于 RocketChip 增加了标签功能, 给硬件请求打上标签, 赋予硬件区分, 隔离和优先化三种新能力。 目录结构: .├── board # supported FPGA boards and files to build a Vivado project├── boot
-
RISC-V 与中断相关的寄存器和指令 [info] 回顾:RISC-V 中的机器态(Machine Mode,机器模式,M 模式) 是 RISC-V 中的最高权限模式,一些底层操作的指令只能由机器态进行使用。 是所有标准 RISC-V 处理器都必须实现的模式。 默认所有中断实际上是交给机器态处理的,但是为了实现更多功能,机器态会将某些中断交由内核态处理。这些异常也正是我们编写操作系统所需要实现的
-
本文介绍了如何移植 RT-Thread Nano 到 RISC-V 架构,以 Eclipse GCC 环境为例,基于一个 GD32V103 MCU 的基础工程作为示例进行讲解。 移植 Nano 的主要步骤: 准备一个基础的 Eclipse 工程,并获取 RT-Thread Nano 源码压缩包。 在基础工程中添加 RT-Thread Nano 源码,添加相应头文件路径。 适配 Nano,主要从 中
-
本文向大家介绍oralce和db2兼容开发注意事项,包括了oralce和db2兼容开发注意事项的使用技巧和注意事项,需要的朋友参考一下 数据库兼容,在开发项目过程中,难免会遇到 更改数据库,或者后期 项目升级,也可能会遇到这种情况,这里就说明下oralce和db2兼容开发注意事项。 兼容oralce、db2开发注意事项(前提是db2版本是9.7,且是开启PLSQL编译选项之后创建的数据库): 1
-
目标 建立一个lesson3项目,解决上一节lesson2遗留下来的—即开发环境打包到生产环境的问题。 知识点 1、process.env.NODE_ENV:node运行环境变量。 课程内容 process.env.NODE_ENV是node运行时的全局变量,node服务端中的任一js文件中都可以拿到它的值,先来试试是否真的能获取到值 先新建一个lesson3的项目,再创建一个test.js文件
-
也搞了eos开发蛮长时间,得写点什么恩,教程嘛,大家都有,就不献丑了,写点开发中遇到的坑吧 首先是环境配置,linux开发是很舒服的,缺少什么关联啊,它都会提示你怎么安装,如果配置中出问题,因为网速或者其他不可抗力出现error的话,恩...把上一个命令重新敲一遍!! 基本就能解决了,反正笔者还没遇到重敲命令不能解决的error...别小看这个error,国内的网速,你电脑的配置,或者网线和猫的爱
-
本文向大家介绍基于 Docker 开发 NodeJS 应用,包括了基于 Docker 开发 NodeJS 应用的使用技巧和注意事项,需要的朋友参考一下 有关这个 Node 应用 此应用包含一个 package.json, server.js 以及一个 .gitignore 文件, 它们简单到可以信手拈来. .gitignore package.json server.js server.js 会拉