
Pytorch实现GoogLeNet的方法

GoogLeNet也叫InceptionNet,在2014年被提出,如今已到V4版本。GoogleNet比VGGNet具有更深的网络结构,一共有22层,但是参数比AlexNet要少12倍,但是计算量是AlexNet的4倍,原因就是它采用很有效的Inception模块,并且没有全连接层。
最重要的创新点就在于使用inception模块,通过使用不同维度的卷积提取不同尺度的特征图。左图是最初的Inception模块,右图是使用的1×1得卷积对左图的改进,降低了输入的特征图维度,同时降低了网络的参数量和计算复杂度,称为inception V1。
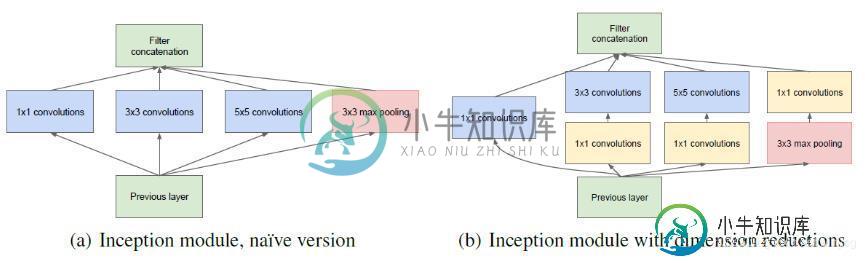
GoogleNet在架构设计上为保持低层为传统卷积方式不变,只在较高的层开始用Inception模块。

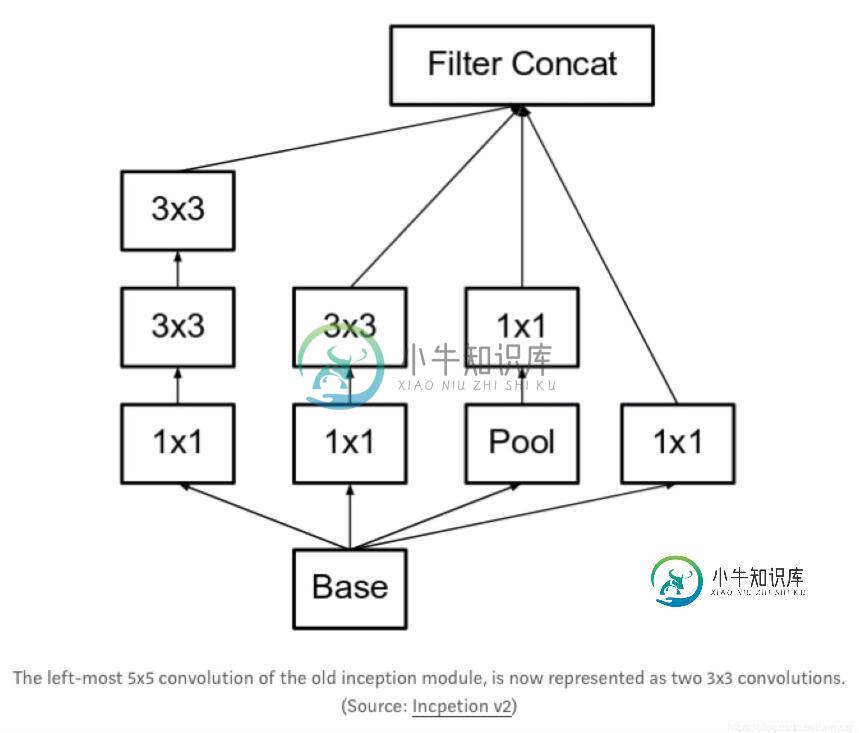
inception V2中将5x5的卷积改为2个3x3的卷积,扩大了感受野,原来是5x5,现在是6x6。Pytorch实现GoogLeNet(inception V2):
'''GoogLeNet with PyTorch.'''
import torch
import torch.nn as nn
import torch.nn.functional as F
# 编写卷积+bn+relu模块
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channals, **kwargs):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channals, **kwargs)
self.bn = nn.BatchNorm2d(out_channals)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
return F.relu(x)
# 编写Inception模块
class Inception(nn.Module):
def __init__(self, in_planes,
n1x1, n3x3red, n3x3, n5x5red, n5x5, pool_planes):
super(Inception, self).__init__()
# 1x1 conv branch
self.b1 = BasicConv2d(in_planes, n1x1, kernel_size=1)
# 1x1 conv -> 3x3 conv branch
self.b2_1x1_a = BasicConv2d(in_planes, n3x3red,
kernel_size=1)
self.b2_3x3_b = BasicConv2d(n3x3red, n3x3,
kernel_size=3, padding=1)
# 1x1 conv -> 3x3 conv -> 3x3 conv branch
self.b3_1x1_a = BasicConv2d(in_planes, n5x5red,
kernel_size=1)
self.b3_3x3_b = BasicConv2d(n5x5red, n5x5,
kernel_size=3, padding=1)
self.b3_3x3_c = BasicConv2d(n5x5, n5x5,
kernel_size=3, padding=1)
# 3x3 pool -> 1x1 conv branch
self.b4_pool = nn.MaxPool2d(3, stride=1, padding=1)
self.b4_1x1 = BasicConv2d(in_planes, pool_planes,
kernel_size=1)
def forward(self, x):
y1 = self.b1(x)
y2 = self.b2_3x3_b(self.b2_1x1_a(x))
y3 = self.b3_3x3_c(self.b3_3x3_b(self.b3_1x1_a(x)))
y4 = self.b4_1x1(self.b4_pool(x))
# y的维度为[batch_size, out_channels, C_out,L_out]
# 合并不同卷积下的特征图
return torch.cat([y1, y2, y3, y4], 1)
class GoogLeNet(nn.Module):
def __init__(self):
super(GoogLeNet, self).__init__()
self.pre_layers = BasicConv2d(3, 192,
kernel_size=3, padding=1)
self.a3 = Inception(192, 64, 96, 128, 16, 32, 32)
self.b3 = Inception(256, 128, 128, 192, 32, 96, 64)
self.maxpool = nn.MaxPool2d(3, stride=2, padding=1)
self.a4 = Inception(480, 192, 96, 208, 16, 48, 64)
self.b4 = Inception(512, 160, 112, 224, 24, 64, 64)
self.c4 = Inception(512, 128, 128, 256, 24, 64, 64)
self.d4 = Inception(512, 112, 144, 288, 32, 64, 64)
self.e4 = Inception(528, 256, 160, 320, 32, 128, 128)
self.a5 = Inception(832, 256, 160, 320, 32, 128, 128)
self.b5 = Inception(832, 384, 192, 384, 48, 128, 128)
self.avgpool = nn.AvgPool2d(8, stride=1)
self.linear = nn.Linear(1024, 10)
def forward(self, x):
out = self.pre_layers(x)
out = self.a3(out)
out = self.b3(out)
out = self.maxpool(out)
out = self.a4(out)
out = self.b4(out)
out = self.c4(out)
out = self.d4(out)
out = self.e4(out)
out = self.maxpool(out)
out = self.a5(out)
out = self.b5(out)
out = self.avgpool(out)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out
def test():
net = GoogLeNet()
x = torch.randn(1,3,32,32)
y = net(x)
print(y.size())
test()
以上这篇Pytorch实现GoogLeNet的方法就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持小牛知识库。
-
本文向大家介绍dpn网络的pytorch实现方式,包括了dpn网络的pytorch实现方式的使用技巧和注意事项,需要的朋友参考一下 我就废话不多说了,直接上代码吧! 以上这篇dpn网络的pytorch实现方式就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持呐喊教程。
-
2014年的 ILSVRC,Google 也参与了,它通过增加模型层数到 22 层,利用 multi-scale data training,取得了第一名的成绩。Google 之所以为这一网络模型命名为 GoogLeNet,是为了致敬 LeNet。 googlenet_v1 Inception 结构 Inception 结构的主要思想是如何找出最有的局部稀疏结构并将其覆盖为近似的稠密组件。 par
-
本文向大家介绍pytorch实现线性拟合方式,包括了pytorch实现线性拟合方式的使用技巧和注意事项,需要的朋友参考一下 一维线性拟合 数据为y=4x+5加上噪音 结果: 多维: 以上这篇pytorch实现线性拟合方式就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持呐喊教程。
-
本文向大家介绍关于Pytorch的MLP模块实现方式,包括了关于Pytorch的MLP模块实现方式的使用技巧和注意事项,需要的朋友参考一下 MLP分类效果一般好于线性分类器,即将特征输入MLP中再经过softmax来进行分类。 具体实现为将原先线性分类模块: 替换为: 并且添加MLP模块: 看一下模块结构: 以上这篇关于Pytorch的MLP模块实现方式就是小编分享给大家的全部内容了,希望能给大家
-
本文向大家介绍pytorch实现focal loss的两种方式小结,包括了pytorch实现focal loss的两种方式小结的使用技巧和注意事项,需要的朋友参考一下 我就废话不多说了,直接上代码吧! 以上这篇pytorch实现focal loss的两种方式小结就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持呐喊教程。
-
本文向大家介绍PyTorch上实现卷积神经网络CNN的方法,包括了PyTorch上实现卷积神经网络CNN的方法的使用技巧和注意事项,需要的朋友参考一下 一、卷积神经网络 卷积神经网络(ConvolutionalNeuralNetwork,CNN)最初是为解决图像识别等问题设计的,CNN现在的应用已经不限于图像和视频,也可用于时间序列信号,比如音频信号和文本数据等。CNN作为一个深度学习架构被提出的