《机制》专题
-
加载随机图像反应本机
我尝试从数组中随机加载gif。我尝试了几种方法,但都没有奏效。我要么收到错误消息,要么图像就不会出现。 版本 1(结果:图像未显示): 版本2(结果:“无效调用”) 版本3(结果:无法加载图像): 有什么想法吗?
-
从主机重启詹金斯从机
我们怎样才能完成它? 注意:使用jenkins-slave作为服务不是一个选项,因为我们有其他安全访问问题。
-
向Ansible主机文件添加主机
我一直试图使用Ansible Playbook将主机名添加到我的主机文件中。我的Ansible播放如下所示,我的主机文件位于: Playbook成功执行,但新主机名没有添加到Ansible hosts文件中。有人能帮我吗?
-
机器学习:支持向量机(SVM)
支持向量机(SVM)是一类按监督学习方式对数据进行二元分类的广义线性分类器,其决策边界是对学习样本求解的最大边距超平面,可以将问题化为一个求解凸二次规划的问题。与逻辑回归和神经网络相比,支持向量机,在学习复杂的非线性方程时提供了一种更为清晰,更加强大的方式。
-
机器学习:感知机算法(PLA)
感知机可以理解为几何中的线性方程:w*x+b=0 对应于特征空间 R^n 中的一个超平面 S ,其中 w 是超平面法向量,b 是超平面的截距。这个超平面将特征空间划分为两个部分。位于两部分的点(特征向量)分别被分为正、负两类。
-
基于主机名的虚拟主机
本文档说明了如何使用基于域名的虚拟主机。 基于域名的虚拟主机和基于IP的虚拟主机比较 基于IP的虚拟主机使用连接的IP地址来决定相应的虚拟主机。这样,你就需要为每个虚拟主机分配一个独立的IP地址。而基于域名的虚拟主机是根据客户端提交的HTTP头中标识主机名的部分决定的。使用这种技术,很多虚拟主机可以共享同一个IP地址。 基于域名的虚拟主机相对比较简单,因为你只需要配置你的DNS服务器将每个主机名映
-
机型 - 添加一个新的机型
PX4使用存储的配置作为机型的起始点。添加配置是非常简单的:在init.d文件夹创建一个新的文件,这个文件需要以一个没有使用的自动启动ID作为文件名的前缀,然后构建并上传固件即可。 如果不想创建自己的配置文件,也可以用SD卡上的文本文件替换掉已有的自定义配置文件,具体细节请查看自定义系统启动页。 机型配置 一个机型配置包括3项基本内容: 应该启动的应用,例如多旋翼或者固定翼的控制器 系统(固定翼,
-
SharedSecrets机制如何工作?
问题内容: 描述为: “共享秘密”的存储库,这是一种在不使用反射的情况下在另一个程序包中调用实现私有方法的机制。package- private类实现了一个公共接口,并提供了在该包内调用package- private方法的能力。实现该接口的对象是通过限制访问的第三包提供的。该框架避免了为此目的使用反射的主要缺点,即损失了编译时检查。 有人可以提供一个示例来说明此机制如何使一个包中的类访问另一个包
-
java异常机制分析
本文向大家介绍java异常机制分析,包括了java异常机制分析的使用技巧和注意事项,需要的朋友参考一下 本文实例分析了Java的异常机制,分享给大家供大家参考。相信有助于大家提高大家Java程序异常处理能力。具体分析如下: 众所周知,java中的异常(Exception)机制很重要,程序难免会出错,异常机制可以捕获程序中的错误,用来提高程序的稳定性和健壮性。 java中的异常分为Checked E
-
详解Android中AsyncTask机制
本文向大家介绍详解Android中AsyncTask机制,包括了详解Android中AsyncTask机制的使用技巧和注意事项,需要的朋友参考一下 在Android当中,提供了两种方式来解决线程直接的通信问题,一种是通过Handler的机制,还有一种就是今天要详细讲解的 AsyncTask 机制。 AsyncTask
-
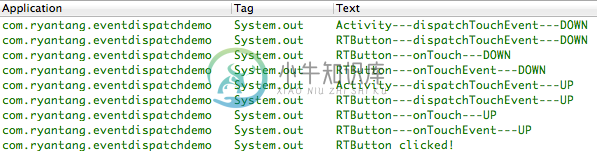 Android事件传递机制
Android事件传递机制本文向大家介绍Android事件传递机制,包括了Android事件传递机制的使用技巧和注意事项,需要的朋友参考一下 实验环境 OS X 10.9 Eclipse(ADT) Android源码版本:API Level 19(Android 4.4) Android事件构成 在Android中,事件主要包括点按、长按、拖拽、滑动等,点按又包括单击和双击,另外还包括单指操作和多指操作。所有这些都构成了A
-
 学习Node.js模块机制
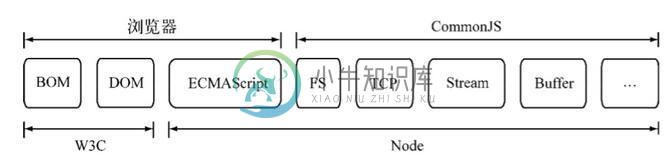
学习Node.js模块机制本文向大家介绍学习Node.js模块机制,包括了学习Node.js模块机制的使用技巧和注意事项,需要的朋友参考一下 一、CommonJS的模块规范 Node与浏览器以及 W3C组织、CommonJS组织、ECMAScript之间的关系 Node借鉴CommonJS的Modules规范实现了一套模块系统,所以先来看看CommonJS的模块规范。 CommonJS对模块的定义十分简单,主要分为模块引用
-
ElasticSearch默认评分机制
问题内容: 我要寻找的是关于ElasticSearch(Lucene)的默认评分机制实际工作方式的简单明了的解释。我的意思是,它使用Lucene评分,还是使用自己的评分? 例如,我想通过“名称”字段搜索文档。我使用.NET NEST客户端编写查询。让我们考虑这种查询: 转换为此类JSON查询: 搜索大约有110万个文档。我得到的回报是(这只是结果的一部分,由我自己格式化): 其中第一个字段只是一个
-
 感兴趣变量机制
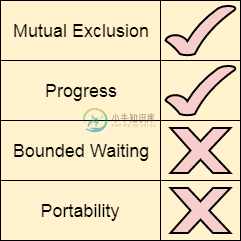
感兴趣变量机制必须确保进度必须由我们的同步机制提供。 在转向变量机制中,由于不想进入临界区的进程并没有考虑其他感兴趣的进程,所以没有提供进展。 另一个进程也将不得不等待,而不管临界区内部没有进程。 如果操作系统可以利用额外的变量以及转向变量,那么这个问题就可以解决,而且我们的问题可以在大部分范围内提供进展。 感兴趣的变量机制利用额外的布尔变量来确保提供进度。 对于进程Pi 对于进程Pj 在这个机制中,使用了一个
-
 测试集锁定机制
测试集锁定机制主要内容:汇编代码中的修改,TSL指令汇编代码中的修改 在锁变量机制中,有时Process读取锁变量的旧值并进入临界区。由于这个原因,多个流程可能会进入临界区。但是,下面第一部分中显示的代码可以用第二部分中显示的代码替换。这不会影响算法,但通过这样做,我们可以设法在一定程度上提供互斥,但不能完全实现。 在更新版本的代码中,Lock的值被加载到本地寄存器R0中,然后锁的值被设置为。 但是,在步骤3中,先前的锁定值(现在存储到R0中)与0