《链路》专题
-
Paypal链式付款(送货地址)
我有一个关于贝宝链接支付发货地址的问题,所以在我的应用程序上(buyer-receiver1(我在那里收集我的%)receiver2(卖家在那里传递其余的钱)。流程是这样的:设置操作类型:创建,调用支付API,接收payKey,setPaymentOption(我在那里设置发货地址),重定向到贝宝页面支付(在审查页面我可以看到发货地址),在卖家页面后,我有这样的消息:卖家保护不合格(我们在文件上没
-
使用Selenium Webdriver单击超链接
我在尝试使用Selenium WebDriver单击超链接时遇到了一个问题。我尝试使用CssSelector和XPath,但似乎都不起作用。我想做的就是点击谷歌文本。
-
链接vs编译vs控制器
创建指令时,可以将代码放入编译器、链接函数或控制器中。 在文件中,他们解释说: 编译和链接功能用于角度循环的不同阶段 然而,对我来说还不清楚,哪种代码应该去哪里。 例如:我可以在compile中创建函数并将它们附加到link中的作用域,还是只将函数附加到controller中的作用域? 如何在指令之间共享控制器,如果每个指令可以有自己的控制器?控制器是真的共享,还是只是范围属性?
-
拉链室流动防止更新
我的存储库中有一个方法: 此方法从api收集结果,然后将结果保存到数据库中,并返回一个flowable,其中这些位置按id从数据库中检索为: 现在,每次我改变其中的一个对象,我可以看到整个我的应用程序的变化。 为什么会这样?nt应该把这两种来源的排放结合起来吗?
-
使用单链接列表排队
我使用的参考资料如下: 出于效率考虑,我们选择队列的前面位于列表的开头,队列的后面位于列表的末尾。这样,我们从头部移除,并在尾部插入。 我想知道为什么在头部插入并在尾巴上移除会不好?这是因为在单链表中,删除尾节点并不容易,因为您必须访问之前的节点,而在单链表中执行此操作的唯一方法是从头开始?
-
Java链式不等式如果(5
这种操作有没有操作人员或技巧?还是有必要使用 ?
-
观察者/可观察模式链
是否有一种设计模式可以形成一个“复合”观察者/可观察者? 我的意思是我有一个可观察的,它在某个变化时通知它的监听器。 每个监听器也是一个可观察的,并通知它自己的监听器(在某个动作上,它做了哪个动作是由第一个可观察的通知触发的)。 这种观察者/可观察的“链接”作为设计是可以的,还是有一个标准的模式?
-
下载链接中的Javafx图像
我正在将图像上传到我的后端并产生下载链接我想下载图像并在javafx中显示它我找到了这个解决方案: 但是我用的是JavaFx 11,我的JavaFx场景imageView包里好像没有ImageViewBuilder这种东西?有什么想法或替代方法吗?
-
Spring Security过滤链中的混乱
使用filters=“none”通过在Spring Security的FilterChainProxy中创建一个空的筛选器链来操作,而访问属性用于在由名称空间配置创建的单个筛选器链中配置FilterSecurityInterceptor。这两者是独立应用的,因此,如果对具有filters=“none”属性的模式的子模式有访问限制,则访问限制将被忽略,即使它被首先列出。不可能将filters=“no
-
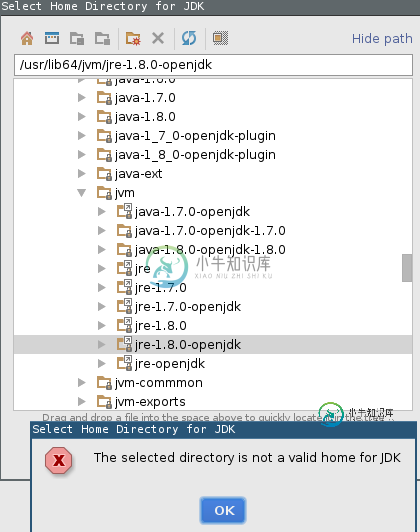 如何将JDK链接到Intellij IDEA
如何将JDK链接到Intellij IDEA嗨,我在创建一个新项目时遇到了麻烦。我无法将JDK链接到IDE。 这里有一个与java相关的my env变量: JAVA主页:/usr/lib64/jvm/jre-1.8.0-openjdk 我该用什么?
-
循环双链表无限循环
基本上,findNode()搜索其数据等于作为参数插入的字符串的节点,但当我调用outputList()方法(该方法返回屏幕上当前节点的字符串表示)时,它将继续无限循环。 outputList方法是: 如有任何帮助,我们将不胜感激。提前道谢。
-
使用递归反转单链表
我做了一个使用递归方法反转单链表的函数。然而,我在执行下面的代码时遇到了一些困难: 我应该如何在ReverseCursive函数/方法中传递第二个参数,以便执行它? 作为第二个参数,我想简单地传递链表的头节点。但是我不知道如何从类的init方法中获取头节点linked_list 我试了几件事,但都解决不了。也许我不太擅长OOP概念。有人能帮我解决这个问题吗?
-
CDC-Debezium在链中捕获数据
CDC-Debezium一旦源系统(如postgres)中发生事件(如Insert、Update或Delete)就捕获这些事件,并将数据流化并发送到目标系统(如NoSQL或Apache-Kafka)。我在这个配置和设置是非常新的。 我想知道在任何事件触发时是否有任何方法捕获表链,例如,假设源系统中有表A父表和B子表。现在表B中发生了一些变化,它被成功捕获并流向目标系统。现在,我需要CDC-Debe
-
如何在redux中链接操作
从研究中,我发现thunk是一种工具,您可以使用它将动作链接在一起和/或处理回调、异步动作和副作用。 我无法理解thunk中间件指南。他们总是引用store.dispatch(就像大多数关于redux的教程一样),但我从未真正调用调度,也从未访问过商店,所以我不确定如何实现他们提出的任何建议。(我假设这是因为我在反应中使用mapDispatchToProps......这在我的动作创建者文件中不是
-
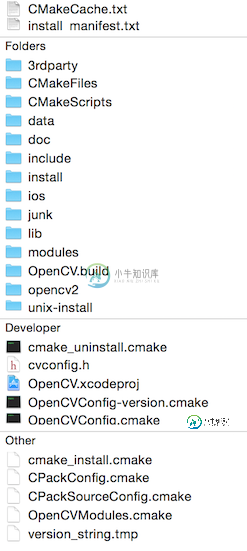 OpenCV for iOS-在Xcode中链接库
OpenCV for iOS-在Xcode中链接库作为团队项目的一部分,我打算使用open CV实现机器人的障碍物检测。我现在已经有了在OS X上运行的功能代码,并使用我的笔记本摄像头来检测接近它的障碍物。然而,机器人运行iOS(它是一个iPad的核心),因此需要我为iOS构建。显然,由于体系结构不匹配,链接器现在不接受OS X库文件。到目前为止,它的设置如下: 1。添加到 2。添加到 3。C++语言方言更改为 4。库添加到(等) 5。设置为,