《opencv》专题
-
 Window10+Python3.5安装opencv的教程推荐
Window10+Python3.5安装opencv的教程推荐本文向大家介绍Window10+Python3.5安装opencv的教程推荐,包括了Window10+Python3.5安装opencv的教程推荐的使用技巧和注意事项,需要的朋友参考一下 1.确定Python版本,电脑64位或者32位 打开cmd(window键+R,输入cmd就出现),在命令行输入:打开cmd(window键+R,输入cmd就出现),在命令行输入:python 可以看到版本是3.
-
 Visual Studio 2015 配置 Opencv3.2的图文详解
Visual Studio 2015 配置 Opencv3.2的图文详解本文向大家介绍Visual Studio 2015 配置 Opencv3.2的图文详解,包括了Visual Studio 2015 配置 Opencv3.2的图文详解的使用技巧和注意事项,需要的朋友参考一下 本文主要讲述如何在Visual Studio 2015中配置Opencv3.2版本 例子使用的是WIN 10 系统 +Visual Studio 2015 + OpenCV 3.2 一,下载O
-
ubuntu14.04安装opencv3.0.0的操作方法
本文向大家介绍ubuntu14.04安装opencv3.0.0的操作方法,包括了ubuntu14.04安装opencv3.0.0的操作方法的使用技巧和注意事项,需要的朋友参考一下 1.安装依赖项 直接编译安装opencv一般会报错,依赖工具需要先安装。 2.下载opencv3(两个版本任选其一) 3.编译和安装 4.配置环境变量 以上这篇ubuntu14.04安装opencv3.0.0的操作方法就
-
使用OpenCV和Python-2.7截屏
问题内容: 我正在使用 Python 2.7 和 OpenCV 2.4.9 。 我需要捕获显示给用户的当前帧,并将其作为 cv :: Mat 对象加载到Python中。 你们知道递归的快速方法吗? 我需要类似下面示例中的操作,该操作以递归方式从网络摄像头捕获 _ Mat_ 帧: 在示例中,它使用了 VideoCapture类 来处理从网络摄像头捕获的图像。 通过VideoCapture.read(
-
一次从OpenCV中的两个摄像机捕获视频
问题内容: 如何使用Python API使用OpenCV一次(或几乎)捕获两个或更多摄像机的视频? 我有三个可以进行视频流传输的网络摄像头,分别位于/ dev / video0,/ dev / video1和/ dev / video2。 以本教程为例,从单个摄像机捕获图像很简单: 这很好。 但是,如果我尝试初始化第二台相机,则尝试从它返回None: 为了确保我不会意外给OpenCV一个不好的相机
-
 Opencv实现图像灰度线性变换
Opencv实现图像灰度线性变换本文向大家介绍Opencv实现图像灰度线性变换,包括了Opencv实现图像灰度线性变换的使用技巧和注意事项,需要的朋友参考一下 本文实例为大家分享了Opencv实现图像灰度线性变换的具体代码,供大家参考,具体内容如下 通过图像灰度线性变换提高图像对比度和亮度,原图像为src,目标图像为dst,则dst(x,y) = * src(x,y) + 。 不仅对单通道图像可以做灰度线性变换,对三通道图像同样
-
 Opencv绘制最小外接矩形、最小外接圆
Opencv绘制最小外接矩形、最小外接圆本文向大家介绍Opencv绘制最小外接矩形、最小外接圆,包括了Opencv绘制最小外接矩形、最小外接圆的使用技巧和注意事项,需要的朋友参考一下 Opencv中求点集的最小外结矩使用方法minAreaRect,求点集的最小外接圆使用方法minEnclosingCircle。 minAreaRect方法原型: 输入参数points是所要求最小外结矩的点集数组或向量; minEnclosingCircl
-
 Opencv实现最小外接矩形和圆
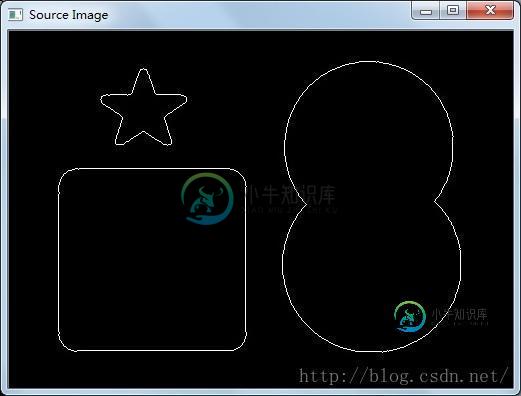
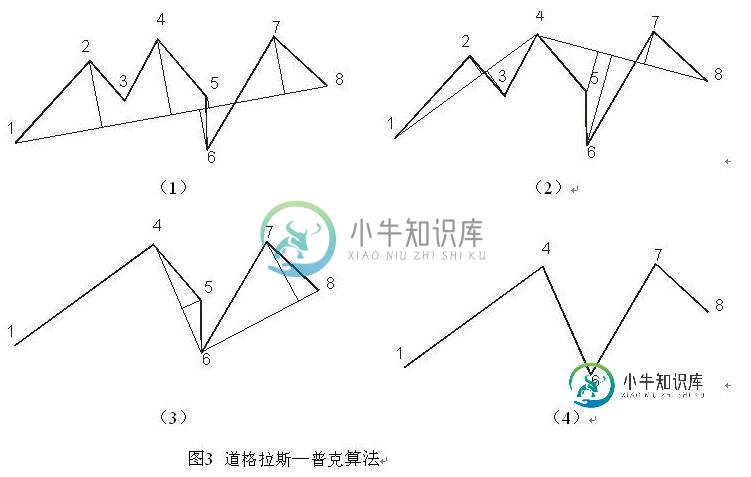
Opencv实现最小外接矩形和圆本文向大家介绍Opencv实现最小外接矩形和圆,包括了Opencv实现最小外接矩形和圆的使用技巧和注意事项,需要的朋友参考一下 本文实例为大家分享了Opencv实现最小外接矩形和圆的具体代码,供大家参考,具体内容如下 步骤:将一幅图像先转灰度,再canny边缘检测得到二值化边缘图像,再寻找轮廓,轮廓是由一系列点构成的,要想获得轮廓的最小外接矩形,首先需要得到轮廓的近似多边形,用道格拉斯-普克抽稀(
-
在Tkinter中使用OpenCV
问题内容: 我正在编写一个程序,该程序需要在Tkinter窗口中显示视频流。由于还将有用于执行各种功能的按钮,因此我使用网格来组织一切。 以下代码是从“显示”网络摄像头序列TkInter修改而来的,在我的Raspberry Pi上可以正常工作: 但是,将其与Tkinter结合使用是行不通的。(在下面的内容中,我尝试注释掉Display 1,Display 2和都不显示。) 如何显示视频? 问题答案
-
将其他键用于opencv的waitKey()函数
问题内容: 我正在开发一个程序(python,opencv),在其中我使用转到下一帧并退出该程序。这些是我要使用的仅有的两个键。我试图找出更多的键,尝试了各种代码,但没有用。特别是方向键。 我发现 这个 约,但它不工作。 所以我的问题是,如何在python-opencv程序中捕获其他键并触发某些功能? 问题答案: 您可以为此使用Python中的函数。 例如,如果要触发“ a”键,请执行以下操作:
-
Python Opencv SolvePnP产生错误的翻译向量
问题内容: 我正在尝试使用单应性在Blender 3d中校准并找到单个虚拟相机的位置和旋转。我正在使用Blender,以便在进入更加困难的现实世界之前可以仔细检查结果。 从固定相机的角度来看,我在不同位置和旋转位置上绘制了十张国际象棋棋盘的图片。使用OpenCV的Python,我曾经从十张图像中从棋盘的检测到的角落中找到本征矩阵,然后将其用于寻找外部参数(平移和旋转)。 但是,尽管估计的参数与实际
-
opencv3/C++ FLANN特征匹配方式
本文向大家介绍opencv3/C++ FLANN特征匹配方式,包括了opencv3/C++ FLANN特征匹配方式的使用技巧和注意事项,需要的朋友参考一下 使用函数detectAndCompute()检测关键点并计算描述符 函数detectAndCompute()参数说明: match()从查询集中查找每个描述符的最佳匹配。 参数说明: FLANN特征匹配示例: 以上这篇opencv3/C++ F
-
 opencv3/C++关于移动对象的轮廓的跟踪详解
opencv3/C++关于移动对象的轮廓的跟踪详解本文向大家介绍opencv3/C++关于移动对象的轮廓的跟踪详解,包括了opencv3/C++关于移动对象的轮廓的跟踪详解的使用技巧和注意事项,需要的朋友参考一下 使用opencv提供的背景去除算法(KNN或高斯混合模型GMM)去除背景,然后将获取的目标二值化后通过筛选目标轮廓获得目标位置。 以上这篇opencv3/C++关于移动对象的轮廓的跟踪详解就是小编分享给大家的全部内容了,希望能给大家一个
-
 opencv3/C++实现视频背景去除建模(BSM)
opencv3/C++实现视频背景去除建模(BSM)本文向大家介绍opencv3/C++实现视频背景去除建模(BSM),包括了opencv3/C++实现视频背景去除建模(BSM)的使用技巧和注意事项,需要的朋友参考一下 视频背景建模主要使用到: 高斯混合模型(Mixture Of Gauss,MOG) K最近邻(k-NearestNeighbor,kNN) history:history的长度。 varThreshold:像素和模型之间马氏距离的平
-
opencv3/C++实现霍夫圆/直线检测
本文向大家介绍opencv3/C++实现霍夫圆/直线检测,包括了opencv3/C++实现霍夫圆/直线检测的使用技巧和注意事项,需要的朋友参考一下 霍夫直线检测 参数说明: 示例: 霍夫圆检测 霍夫圆检测对噪声比较敏感,一般要先对图像做中值滤波。 参数说明: 示例: 以上这篇opencv3/C++实现霍夫圆/直线检测就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持呐喊教程。