
给定一些AABB,找到包含它们的最小总表面积AABB?

我有许多对象需要渲染到HTML5画布上。我的输入是轴对齐边界框的有序列表。这些框经常重叠,但也经常在它们之间留下大面积的空白。
我想尽量减少我必须创建的画布表面面积,以便以正确的顺序渲染所有这些项目,而不必在多个画布上渲染单个对象的部分(从而避免简单地创建紧贴所有占用空间的画布)。
所以基本上,我希望紧密的对象组都呈现在同一个画布上,而不重叠的对象应该呈现在单独的画布上。但是,并不是所有重叠的对象都应该呈现在单个画布上——例如,一个非常高、非常宽的对象稍微重叠形成一个L,仍然应该呈现在两个单独的画布上,因为将它们组合在一起会导致L的开放部分浪费很多画布空间。
维护 Z 顺序也会导致一些困难的情况。例如,下图表示一种潜在的排列方式:
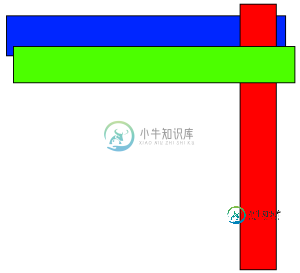
在这种情况下,您可能希望将蓝色和绿色图层合并到一个画布中,但是如果不包括红色图层,您就无法以这种方式产生正确的分层,并且您最终会有很多死空间。
但是你也不能只将组合图层限制在Z顺序连续的项目上。Z顺序可能与上图相同,但是红色项目可能碰巧与其他项目不重叠,在这种情况下,你确实想组合蓝色和绿色图层。
我在苦苦思索这个问题的好算法。有人想插话吗?
共有3个答案
从AABBs的z排序数组开始,
>
将每个 AABB 添加到结果数组中,也按 z 顺序排序
一个。将这些要添加的 AAB 中的每一个与结果数组中已有的所有其他 AAB 进行比较
>
查看要添加的AABB和任何其他AABB的哪个组合会产生最小的额外表面积。(可能没有一个会,并且要添加的AABB不应该与任何其他组合。)
当合并会导致表面区域变小时,请检查相交问题(即,另一个AABB与另一个AABB重叠,并且与要添加的AABB重叠)
如果不存在这样的交叉问题,请记住另一个AABB,继续寻找更好的可能组合
湾。当最终找到最佳组合(或没有组合)时,将待添加的AABB添加到结果数组中
>
根据交叉点问题的存在,要添加的AABB可以与结果数组中的其他AABB组合并插入到其他AABB的位置
否则,组合或新AABB本身被添加到结果数组的顶部
对下一个 AABB 重复上述步骤
它不是一个很好的算法,也不能完美地完成所有事情。首先,当发现AABB的组合时,它不会试图找出是否也可以将第三或第四(或第五)个AABB添加到组合中以改进区域保护。
以下是此算法在 Java 脚本中的实现:
algorithm = function(allAABBsInSortedOrder) {
var smallestCanvasSurfaceArea = [];
goog.array.forEach(allAABBsInSortedOrder, function(aabb) {
smallestCanvasSurfaceArea = findSmallestSurfaceArea(aabb, smallestCanvasSurfaceArea);
})
};
findSmallestSurfaceArea = function(nextAABB, combinedAABBsInSortedOrder) {
var nextAABBarea = areaOf(nextAABB);
if (!nextAABB) {
return combinedAABBsInSortedOrder;
}
var aabbToCombineWith = {'index': -1, 'area': nextAABBarea, 'upOrDown': 0};
goog.array.forEach(combinedAABBsInSortedOrder, function(aabb, idx) {
// Improvement - exhaustive combinations (three AABBs? Four?)
if (areaOf(combine(aabb, nextAABB) - nextAABBarea <= aabbToCombineWith['area']) {
var overlapLower = false;
var overlapNext = false;
goog.array.forEach(combinedAABBsInSortedOrder, function(intersectAABB, intersectIdx) {
if (intersectIdx > idx) {
if (checkForIntersect(aabb, intersectAABB)) {
overlapLower = true;
}
if (checkForIntersect(nextAABB, intersectAABB)) {
overlapNext = true;
}
}
});
if (overlapLower && !overlapNext) {
aabbsToCombineWith['index'] = idx;
aabbsToCombineWith['area'] = areaOf(aabb);
aabbsToCombineWith['upOrDown'] = -1;
}
else if (!overlapLower && overlapNext) {
aabbsToCombineWith['index'] = idx;
aabbsToCombineWith['area'] = areaOf(aabb);
aabbsToCombineWith['upOrDown'] = 1;
}
else if (!overlapLower && !overlapNext) {
aabbsToCombineWith['index'] = idx;
aabbsToCombineWith['area'] = areaOf(aabb);
aabbsToCombineWith['upOrDown'] = 0;
}
}
});
if (aabbToCombineWith['index'] != -1) {
var combinedAABB = combine(combinedAABBsInSortedOrder[aabbToCombineWith['index']], nextAABB);
if (aabbToCombineWith['upOrDown'] == -1) {
combinedAABBsInSortedOrder[aabbToCombineWith['index']] = combinedAABB;
}
else {
combinedAABBsInSortedOrder.push(combinedAABB);
combinedAABBsInSortedOrder.splice(aabbToConbineWith['index'], 1);
}
}
else {
combinedAABBsInSortedOrder.push(nextAABB);
}
return combinedAABBsInSortedOrder;
};

这里有一个简单的建议,它可能不会解决某些角落问题,但至少可以部分解决,并有望提出更好的解决方案:
a = <a z-ordered list of the objects> ;
b = [];
bounds = null;
objects = [];
while ( a.length > 0) {
c = a.pop();
if( <c overlaps bounds> && <area of combined canvases> < <area of seperate canvases> || bounds === null) {
objects.push(c);
bounds = <union of bounds and c, or bounds of c if bounds is null>;
} else {
b.push(c);
}
if( a.length === 0) {
a = b;
b = [];
<do something with the current bounds and objects list>
bounds = null;
objects = [];
}
}
在哪里
< area of combined canvases> = sum( < area of each canvas> ) - sum( <interesections> )
< area of seperate conavases> = sum( < area of each canvas> )
这不会捕捉到两个非相交对象都与一个公共对象相交的情况,但可以通过在每次迭代时回顾所有较低z顺序的对象来改进这种情况。

此问题在 3D 中众所周知,用于在光线追踪或碰撞检测中构建高性能 AABB 层次结构。尝试在谷歌上搜索“BVH”,“表面积启发式”和/或“SAH”。以下论文的3.1节具有良好的启发式算法;这应该很容易适应你的2D案例:http://graphics.stanford.edu/~boulos/papers/togbvh.pdf
-
在加权无向图中,我需要找到一个包含给定边“e”的最小生成树,如果可能的话。我该怎么做呢?Kruskal从“e”开始?
-
例如,给定一个占用网格: 其中, 表示一个被占用的块,表示一个自由块, 表示一个感兴趣的点(或块),那么找到包含 但不包含任何障碍物(即任何 )的最大矩形的最省时的算法是什么? 例如,所提供网格的解决方案将是: 鉴于我们有一个已知的起点,我不禁认为必须有一个简单的解决方案来将线条“捕捉”到外部边界以创建最大的矩形。 我目前的想法是以循环的方式将线捕捉到最大位置偏移(即转到下一行或下一列,直到遇到障
-
我试图解决类似于这个问题,但有一些修改: “给定一个值V,如果我们想换V美分,并且我们有无限量的C={C1,C2,…,Cm}值硬币,那么换硬币的最小数量是多少?” 输入:硬币[]={25,10,5},V=30 输出:至少需要2个硬币 我们可以用一枚25美分的硬币和一枚5美分的硬币 在我的例子中,我有一个对象数组,而不仅仅是一个数字数组。每件物品都有数量和价格。我想打印构成给定数量的最小数量的对象,
-
这是考试准备的一部分。我知道这和最大流量算法有关,但我很乐意给你一个提示: 设为无向连通图,为权函数,为边,。描述一种算法,该算法确定是否可以从图中最多删除边,以便属于新图的最小生成树。 我认为生成树是一种完美的匹配。但是,如何使它最小化,包含e和适当数量的其他边?
-
这是一个面试问题。 我们被赋予各种矩形的尺寸,我们必须找出可以包围所有矩形的矩形面积(最小值)?矩形也可以旋转。 在将矩形拟合到最小可能区域之前,我曾问过一个类似的问题。 上述方法考虑了所有可能性、旋转,并在所有布局情况下确定了所有此类可能性的最小值<我们不能先求矩形面积之和,然后再求最大长度、最大宽度吗?
-
我有一个元素数组< code>[(A1,B1),...,(An,Bn)](都是正浮点和Bi 毫无疑问,我可以尝试所有这些方法,并选择一个给出最小和的方法(这将给出正确的结果O(n!)). 我尝试将总和更改为并尝试使用贪婪算法,该算法在每个步骤上获取最大的Ai元素(这不会产生正确的结果)。 现在,当我看最新的方程时,我觉得这里我看到了最优子结构,因此我必须使用动态编程,但我无法找出正确的方向。有什么