
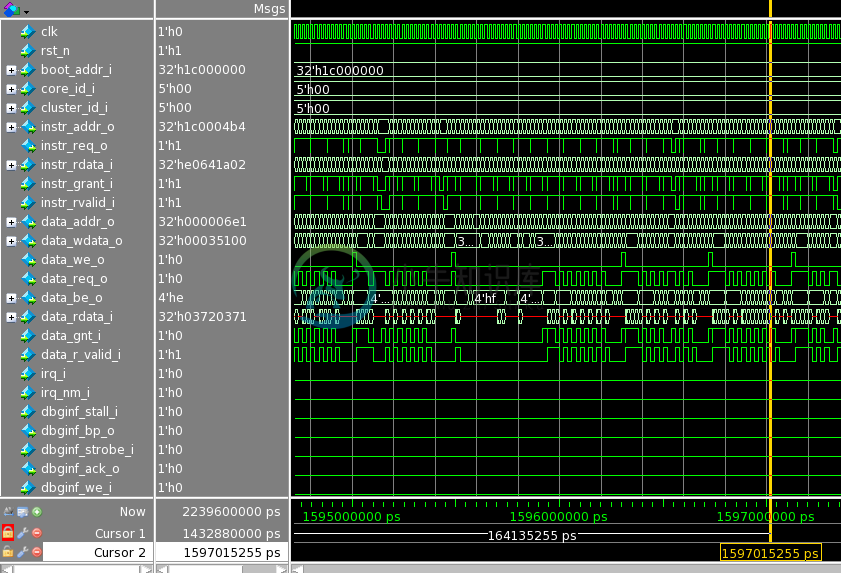
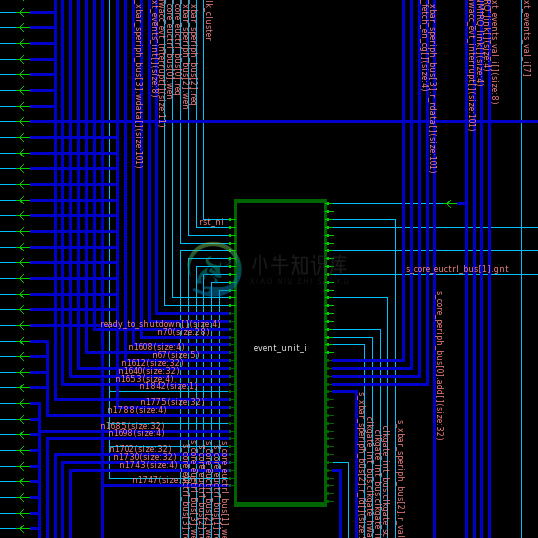
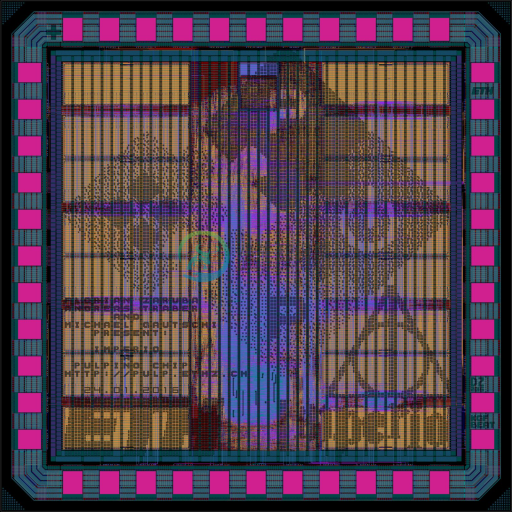
PULPino是一个开源的微型控制系统,基于一个小32位RISC-V核心,由瑞士苏黎世联邦理工学院开发。核心IPC接近1,完全支持基整数指令集(RV32I),压缩指令(RV32C)和部分支持乘法指令集扩展(RV32M)。
-
一、FPGA 此文件夹包含在ZedBoard或ZYBO上合成和运行PULPino所需的所有内容。 若选择ZYBO而不是ZedBoard,请设置环境变量“BOARD”。在tcsh中这意味 setenv BOARD "zybo" or setenv BOARD "zedboard" 注意:如果未设置BOARD,则默认为zedboard。必须在编译所有FPGA相关组件器件设置此环境变量,如果您不小心
-
http://www.digilent.com.cn/community/566.htm
-
我正在制作一个游戏,这里我希望最终用户按下Ctrl W退出系统。 这是我使用的代码: ……但它似乎不起作用 有人能告诉我我的代码有什么问题吗? 提前谢谢!
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/debug/system_console.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e PX4 System Console(系统控制台) System Console(系统控制台)允许访问系统底层
-
什么是微控制器,为什么需要微控制器? 在阅读Arduino 文档的时候, Arduino是一款便捷灵活、方便上手的开源电子原型平台。包含硬件(各种型号的Arduino板)和软件(ArduinoIDE)。由一个欧洲开发团队于2005年冬季开发。其成员包括Massimo Banzi、David Cuartielles、Tom Igoe、Gianluca Martino、David Mellis和Nic
-
我对Kubernetes还很陌生,只是从一个示例项目开始学习。我目前正在运行一个.NET微服务,它需要一个MongoDB作为数据库。微服务被打包到Docker映像中,我创建了一个单独的Helm图表来正确部署我的微服务和所需的MongoDB。 是这样做的吗?还是我错过了什么?所有给我指明正确方向的线索都非常欢迎!
-
Cocos Creator 中内置了一个简单易用的碰撞检测系统,他会根据添加的碰撞组件进行碰撞检测。 当一个碰撞组件被启用时,这个碰撞组件会被自动添加到碰撞检测系统中,并搜索能够与他进行碰撞的其他已添加的碰撞组件来生成一个碰撞对。 需要注意的是,一个节点上的碰撞组件,无论如何都是不会相互进行碰撞检测的。 碰撞检测系统的使用 碰撞系统接口 获取碰撞检测系统 var manager = cc.dire
-
12.1 并行版本系统(CVS) 有关的详细信息可使用 lynx 查阅 /usr/share/doc/cvs/html-cvsclient、/usr/share/doc/cvs/html-info、/usr/share/doc/cvsbook 或执行 info cvs 及 man cvs。 12.1.1 安装 CVS 服务器 以下步骤配置的服务器,仅允许“src”用户组的成员访问 CVS 仓库,并