
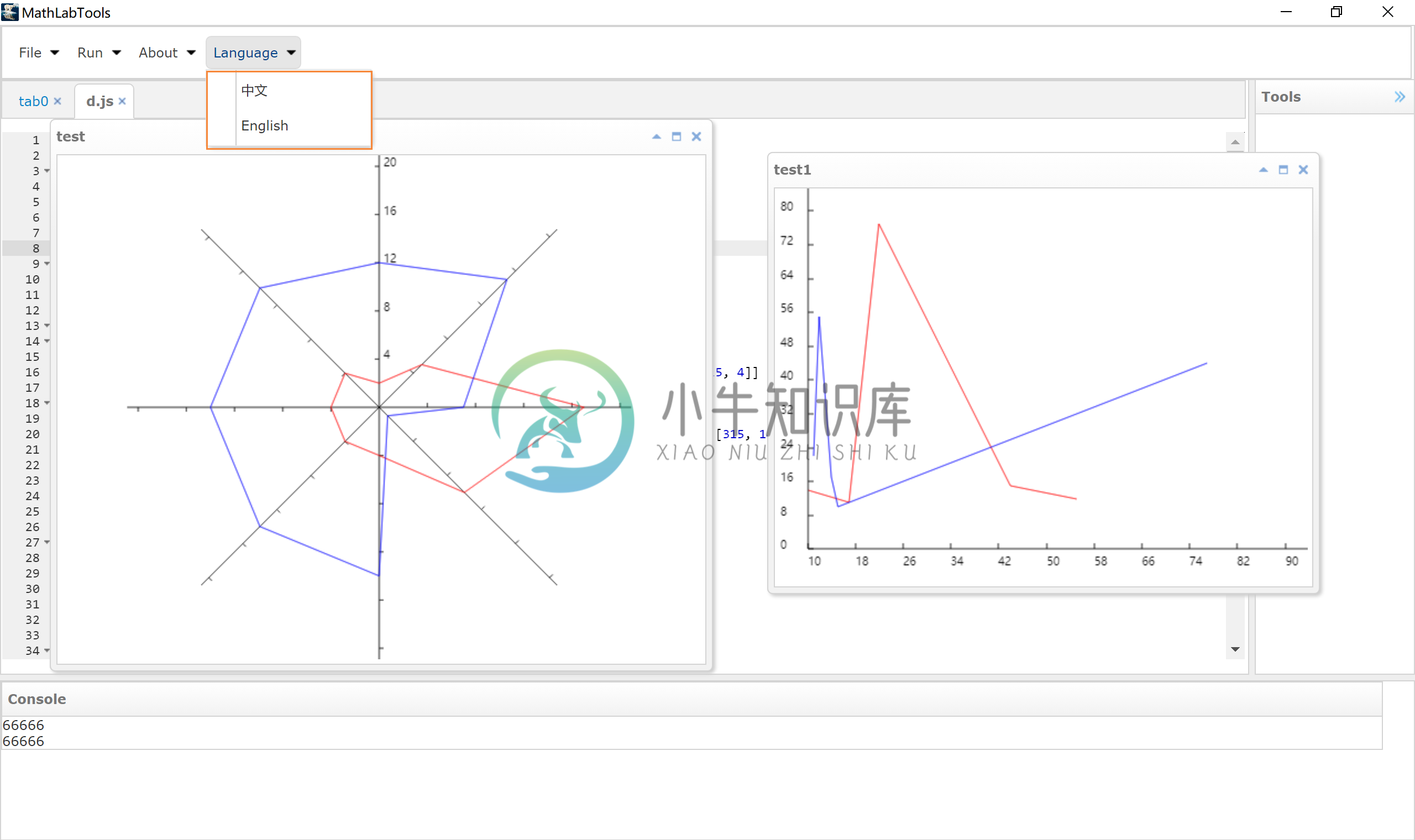
MathLabTool 是一款数学仿真、图形化工具,可为数学相关的实验、仿真、图形化等各类需求,提供便捷工具。 可以为数据绘制各类2D、3D图形,显示实时串口数据图形,封装各类算法。
资源
环境
node v16.17.0
node-gyp v9.1.0
npm 8.15.0
yarn 1.22.19
electron 22.0.0
electron node 16.17.1
安装
yarn install
运行
yarn start
打包
yarn dist
./build/* setup *.exe
帮助手册
- File: 鼠标悬停在文件菜单上,子菜单可进行文件新增、打开、保存操作。
- Run: 鼠标悬停在运行菜单上,子菜单可运行当前文件代码。
- Language: 鼠标悬停在语言菜单上,子菜单可切换工具语言。
功能列表
- 代码编辑、保存、打开(JavaScript 语法)
- 控制台打印
- 折线图
- 雷达图
- csv 数据转换
- 矩阵清零
- 矩阵转置
- 矩阵乘法
- 矩阵求逆(高斯)
- 生成单位矩阵
- 生成正态分布数据(box-muller)
- 生成平均、数量、最大、最小值
- 生成方差和标准差
- 直方图
- 卡尔曼滤波
- 自定义公式计算
- 自定义公式图像绘制
- 三维图像-折线图
接口文档
特点
- 开源: 保持开源。
- 文档: 提供接口参考。
- 易上手: 采用javascript语法。
- 易用: 持续迭代。
- 功能完备: 持续迭代。
测试
| 环境 | 测试 |
|---|---|
| Win 10 x64 | ✓ |
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/airsim.md translated_sha: RETRANSLATE AirSim仿真 AirSim是一个基于虚幻引擎(Unreal Engine)的开源、跨平台无人机模拟器。它可以使用硬件在环(HITL)或软件在环(SITL)的方式为Pixh
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/hitl.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e 硬件在环仿真 硬件在环仿真指的自驾仪与仿真器相连并且所有的代码运行在自驾仪上的仿真。这种方法的优点是可以测试代码在实际处
-
Gazebo是一个自主机器人3D仿真环境。它可以与ROS配套用于完整的机器人仿真,也可以单独使用。本文简要介绍单独的使用方法。 {% raw %} To view this video please enable JavaScript, and consider upgrading to a web browser that supports HTML5 video {% endraw %} {%
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/sitl.md translated_sha: b522243efef9deb5e2d3ae7bd03ae9ed0eee3418 Multi-Vehicle Simulation This tutorial explains how to simul
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/simulation/sitl.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e 软件在环仿真 (SITL) 软件在环仿真是在主机上运行一个完整的系统并模拟自驾仪。它通过本地网络连接到仿真器。 设置成如
-
Simulators allow PX4 flight code to control a computer modeled vehicle in a simulated “world”. You can interact with this vehicle just as you might with a real vehicle, using a QGroundControl, offboar