
Cartographer,是Google开源的一个ROS系统支持的2D和3D SLAM(simultaneous localization and mapping)库。
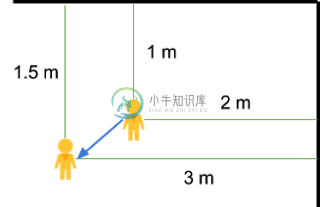
SLAM 算法结合来自多个传感器(比如,LIDAR、IMU 和 摄像头)的数据,同步计算传感器的位置并绘制传感器周围的环境。例如,使用该方法绘制住室的平面图:
-
拿着一台激光测距机站在房屋中央,在纸上画一 X ;
-
测量你所在位置到任一墙面的距离;
-
在墙面所在位置画一条线,并写下 X(你所在位置)与墙面之间的距离;
-
测量你所在位置到另一墙面的距离并画出代表墙面的直线;
-
现在,移动到房屋的另一位置;
-
因为墙面不会移动,你可以测量到上述两个墙面的距离,从而测定你的位置;
SLAM 是众多自动驾驶平台的重要组件,比如自动驾驶汽车、仓库中的自动叉车、扫地机器人、UAVs 等。
在产业界和学术界常见的传感器配置上,Cartographer 能实时建立全局一致的地图。
-
cartographyer安装分为二进制安装和源码安装,对于想学习源码的同学,选择源码安装,对于只是配置参数的同学安装二进制足矣。 一、二进制安装(一键安装) sudo apt-get install ros-<distro>-cartographer* 二、源码安装 (一)、准备工作 1、安装依赖: sudo apt-get install -y \ cmake \ g++ \
-
cartographer安装和使用 1.安装RPLIDAR 建立工作空间(catkin_ws/src是工作路径) mkdir -p ~/catkin_ws/src #创建文件夹,catkin_ws、src都是文件名可以按照自己的要求更改 cd ~/catkin_ws/src #在src文件下进行安装rplidar工具包 git clone https://github
-
cartographer编译与运行 1、下载源码 详细注释版 GitHub - xiangli0608/cartographer_detailed_comments_ws: cartographer work space with detailed comments 官方版 GitHub - cartographer-project/cartographer: Cartographer is a
-
参考链接 https://doc.bwbot.org/zh-cn/books-online/xq-manual/topic/136.html https://google-cartographer-ros.readthedocs.io/en/latest/ 基本步骤 1.安装依赖 sudo apt-get update sudo apt-get install -y \ cmake \
-
一、Cartographer-ros的安装: 1.1 安装Cartographer 参考官方文档安装即可。 https://google-cartographer.readthedocs.io/en/latest/ 1.2 安装cartographer-ros 同样参考官方文档安装即可。 https://google-cartographer-ros.readthedocs
-
(一) 定义的各种坐标系间的关系 1. map_frame = “map”,cartographer中使用的全局坐标系,最好保持默认,否则ROS的Rviz不认识其它的定义,导致无法可视化建图过程。 2.tracking_frame=”base_link”,机器人中心坐标系,很重要,其它传感器数据都是以这个为基础进行插入的。cartographer_ros里面有个tf_bridge的类就是专门用来查
-
Cartographer Algorithm walkthrough for tuning 本文章有后续更新版本,csdn排版和插入图片有点麻烦,我更新在我的个人站点了,欢迎阅读! @author 薛轲翰 @email1 kehan.xue@gmail.com @email2 17795832478@mail.nwpu.edu.cn 本文参考cartographer官方文档. cartograph
-
Cartographer学习 一、launch文件 cartographer启动的launch文件是存放在cartographer_detailed_comments_ws/src/cartographer_ros/cartographer_ros/launch/文件夹中,也可以在该文件夹下创建自己的launch文件。 <launch> <!--rosbag包的地址--> <arg nam
-
1.cartographer开启 launch文件 <launch> <arg name="configuration_directory" default="$(find cartographer_launch)/configuration_files"/> <arg name="configuration_basename" default="turtlebot_urg_lida
-
在绝大多数现代的Unix类操作系统(例如Linux、BSD等)上,只需要一个C++编译器就可以编译并运行Sphinx/Coreseek,而不需要对源码进行任何改动。 目前,Sphinx/Coreseek可以在以下系统上运行: Linux 2.4.x, 2.6.x (包括各种发行版,如Redhat、Centos、Debian、OpenSuse等) Windows 2000, 2003, XP, Vi
-
如果您想使用Maven,Gradle或Ant以外的构建工具,您可能需要开发自己的插件。 可执行jar需要遵循特定的格式,并且某些条目需要以未压缩的形式编写(有关详细信息,请参阅附录中的“可执行jar格式”部分)。 Spring Boot Maven和Gradle插件都使用spring-boot-loader-tools来实际生成jar。 如果需要,您可以直接使用此库。 8.4.1 重新打包Arch
-
我正在尝试使用Eclipse IDE(使用Windows 7)创建我的第一个C exeecutable。我得到了以下错误,而建设。 如何纠正它? 错误:: 无法获取主线程的上下文,错误 998 信息:配置“Debug”使用此系统不支持的工具链“Cygwin GCC”,仍在尝试构建。 使所有 构建文件:../src/lest test . CPP '[SIG]C:\ cygnus \ Cygwin-
-
本文向大家介绍怎么查看系统支持的所有信号?相关面试题,主要包含被问及怎么查看系统支持的所有信号?时的应答技巧和注意事项,需要的朋友参考一下 答案: kill -l
-
GCC编译器提供了一组内置函数来测试某些处理器特性,如某些指令集的可用性。但是,根据这个线程,我们也可能知道某些cpu功能可能不会被OS启用。所以问题是:<code>__builtin_cpu_supports</code>intrinsic是否也检查操作系统是否启用了某些处理器功能?
-
问题内容: 背景 在Maven中,工件可以使用 这意味着该依赖性不是必需的,但可以使用(如果存在)。 模块系统状态似乎指定一个模块只能读取其所需的模块。 问题 Java 9模块系统确实不支持可选依赖项吗? 为什么不? Java 9模块系统提供了哪些可选的依赖项替代方案? 用例 我有一个框架,该框架集成了应用程序可能使用或可能不使用的各种库。当前,该框架是单个JAR,可反映类路径以跳过缺少库的集成代
-
有没有人知道一个教程,或一个示例项目,我可以从中获得想法,使一个多部分的上传工作?是否需要使用TransferManager来执行此操作? 提前多谢!
-
构建多种系统架构支持的 Docker 镜像 -- docker manifest 命令详解 我们知道使用镜像创建一个容器,该镜像必须与 Docker 宿主机系统架构一致,例如 Linux x86_64 架构的系统中只能使用 Linux x86_64 的镜像创建容器。 Windows、macOS 除外,其使用了 binfmt_misc 提供了多种架构支持,在 Windows、macOS 系统上 (x