
ArduPilotMega(APM) 无人机控制系统
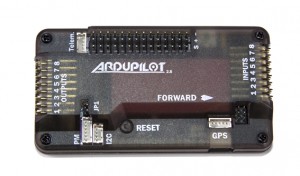

ArduPilotMega (APM) 是市面上最强大的基于惯性导航的开源自驾仪(并且是最便宜的之一!)
特性包括:
- 免费开源固件,支持飞机("ArduPlane"),多旋翼 (四旋翼, 六旋翼, 八旋翼等), 直升机("ArduCopter")和地面车辆("ArduRover")!
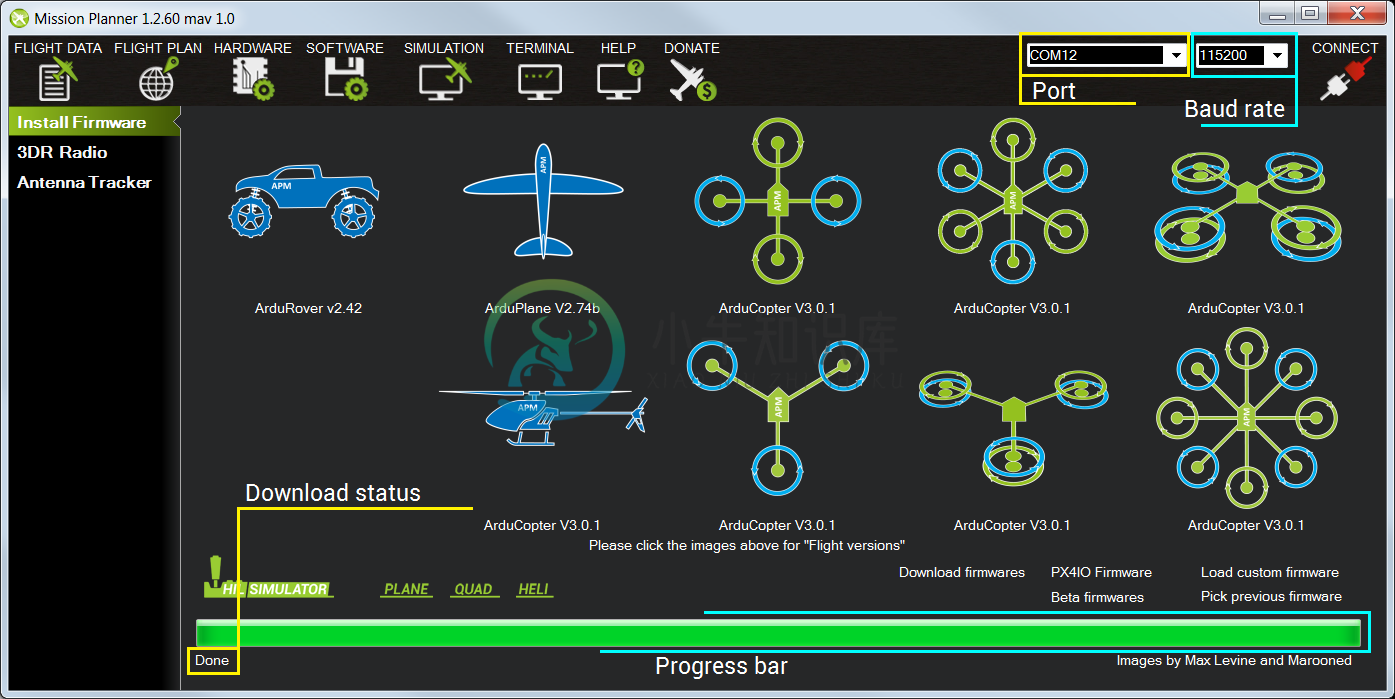
- 通过点击式的工具简单设置和上传固件。无须编程!(但是你想搞搞代码的话,可以使用简单的嵌入式编程工具: Arduino)
- 通过点击式的桌面程序完全的规划任务脚本
- 可以支持上百个三维航点
- 使用强大的 MAVLink 协议,支持双向遥测和飞行中控制命令T
- 多种免费地面站,包括 HK GCS, 支持任务规划,空中参数调整,视频显示,语音合成和完整的带回放的数据记录
- 跨平台。支持Windows, Mac 和 Linux。在 Windows 下使用图形任务规划设置工具 (Mac 下可用模拟器) 或在任何操作系统下使用命令行界面。三种操作系统上都有可用的地面站程序。基于 Arduino 编程环境,也是完全跨系统的。
- 自动起飞,降落和特殊的动作命令,例如视频和照相控制
- 完整支持 Xplane 和 Flight Gear 半硬件仿真
- 包括继电器,可以触发任何设备,可以根据任务脚本控制
- 硬件包括:
- 三轴陀螺仪
- 三轴加速度计
- 测量高度的空气压力传感器
- 10Hz GPS 模块
- 监视电池状态的电压传感器
- 4Mb板上数据记录存储器。任务数据自动记录,并可以导出为 KML 格式
- 内建硬件失效处理器,在失控时可以返回出发点
- (可选) 三轴磁力计
- (可选) 空速传感器
- (可选) 电流传感器
ArduPlane 历史
ArduPlane 是 ArduPilotMega 自动驾驶仪硬件上的一个固定翼软件。它是DIY Drones社区的创造,硬件由社区的商业部分 3D Robotics制造。下面是该项目的历史:
2009年1月:通过 Sparkfun 发布第一个 [!ArduPilot(Atmega168处理器)。
2009年4月:ArduPilot to升级到 Atmega328 芯片。
2010年4月:ArduPilotMega(APM)发布(改进 ArduPilot, 迁移到更强的Arduino Mega 平台,带有 Atmel 1280 处理器);
2010年5月:APM 的 IMU 盖板 发布。
2010年9月:APM 1.0,第一个基于 IMU 的 APM 自动驾驶仪代码 公布。
2011年3月:APM 2.0 发布,支持 MAVlink 通信协议和完整的双向地面站通信,
2011年4月:APM 板 升级到 Atmega2560 处理器。
2011年9月:为了避免混乱与APM的支持不同种类平台的各种代码库 - 固定翼飞机,直升机,地面车辆 - 重名,软件项目更名,明确区分硬件部分和软件部分。现在 APM 只是指电子部分,而软件项目被称为 ArduPlane*,ArduCopter*,ArduRover*,ArduBoat*,ArduBlimp*,等等。APM 是现在通用的自动驾驶仪,这意味着它可以简单地加载相应的软件控制的任何车辆。
-
ArduPilotMega (APM) 是市面上最强大的基于惯性导航的开源自驾仪 特性包括: 免费开源固件,支持飞机("ArduPlane"),多旋翼 (四旋翼, 六旋翼, 八旋翼等), 直升机("ArduCopter")和地面车辆("ArduRover")! 通过点击式的工具简单设置和上传固件。无须编程!(但是你想搞搞代码的话,可以使用简单的嵌入式编程工具: Arduino) 通过点击式的桌面程
-
飞行模式介绍 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。 1. Acro(特技模式) 直接用摇杆控制飞行器的角速度,松开摇杆飞行器将保持原有的姿态。常用于特技表演。 2. Alt Hold(定高模式) 在Alt Hold模式下,飞行器保持高度不变,可以操作俯仰、滚转和偏航。Alt Hold模式是很多模式的基础,例如Loiter和Spor
-
http://bbs.loveuav.com/thread-54-1-1.html ArduPilotMega ( APM ) 是市面上最强大的基于惯性导航的开源自驾仪 特性包括: 免费开源固件,支持飞机("ArduPlane"),多旋翼 (四旋翼, 六旋翼, 八旋翼等), 直升机("ArduCopter")和地面车辆("ArduRover")! 通过点击式的工具简单设置和上传固件。无须编程!(但
-
一、手上四旋翼淘宝店链接: https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-1238773615.24.646c63fcm28vYf&id=531355404129 二、调参F450-APM2.8-AT9组装和调参教程(视频) http://v.youku.com/v_show/id_XMjUyODYwMDA0NA==.html 三 、AP
-
pixhawk是硬件平台, PX4是pixhawk的原生固件,专门为pixhawk开发的 APM(Ardupilot Mega)也是硬件 Ardupilot是APM的固件,所以称ArduPilot固件也叫APM 后来APM硬件性能不太够,所以APM固件也就针对兼容了Pixhawh硬件平台 所以在pixhawk硬件平台上可以运行PX4固件(原生固件),也可以运行APM固件 APM固件程序比较混乱,零
-
数据概览 1.机器人问答界面 机器人问答是系统中重要的组成部分,能够帮助企业回答用户高重复、高频、无人或忙碌阶段的问答问题,较好的使用机器人问答能够回复80%以上的客户问题,通过知识维护和学习还将不断提高问答率,节省企业人工,提升准确率。 机器人问答界面包括几种类型: 单独网页标签页界面:单独网页咨询界面是一个独立网页,包含较为全面的页面信息 独立咨询控件窗口界面:单独的咨询控件窗口界面是一个悬浮
-
我正在制作一个游戏,这里我希望最终用户按下Ctrl W退出系统。 这是我使用的代码: ……但它似乎不起作用 有人能告诉我我的代码有什么问题吗? 提前谢谢!
-
translated_page: https://github.com/PX4/Devguide/blob/master/en/debug/system_console.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e PX4 System Console(系统控制台) System Console(系统控制台)允许访问系统底层
-
#软件开发笔面经# 二面和一面相比更是抽象,感觉字节系的面试官都是不愿意说话,具体体现在面试中就是多余的一个字都不说,项目也不怎么问,导致我一度以为一面挂了,也许这就是字节风格吧 项目: 介绍完之后又是象征性地问了问之前自驾工程侧的开发内容,参考一面 面试官直接表示了对算法侧的东西不太感兴趣,表示工程是这样的,算法那边只要实现就完事了,但是工程要考虑的就很多了 手撕: “给你40分钟做下这个啊”
-
有没有可能让我的不和谐机器人发送消息,而不必在不和谐中键入命令?相反,我想从我的应用程序内部触发它。 上面的代码给出了一个属性错误:'NoneType'对象没有属性'send'
-
让我来布置一下背景: Discord Bot Maker:我有一个升级系统,它可以根据帖子添加xp,并将其存储到JSON文件中,并且可以正常工作。一旦成员达到某个xp级别,bot将在discord中为他们分配一个新角色。如果我必须重新启动bot,所有拥有xp的成员都会在1级重新启动,使用0 xp。 不一致JSI有一个xp机器人,它根据帖子添加xp,并将信息存储在在线MySQL数据库中。当角色达到某
-
对于ROS新手而言,可能会有疑问:学习机器人操作系统,实体机器人是必须的吗?答案是否定的,机器人一般价格不菲,为了降低机器人学习、调试成本,在ROS中提供了系统的机器人仿真实现,通过仿真,可以实现大部分需求,本章主要就是围绕“仿真”展开的,比如,本章会介绍: 如何创建并显示机器人模型; 如何搭建仿真环境; 如何实现机器人模型与仿真环境的交互。 本章预期的学习目标如下: 能够独立使用URDF创建机器
-
主要内容:总结通过前几节对可利用空间表进行动态存储管理的介绍,运行机制可以概括为: 当用户发出申请空间的请求后,系统向用户分配内存;用户运行结束释放存储空间后,系统回收内存。这两部操作都是在用户给出明确的指令后,系统对存储空间进行有效地分配和回收。 但是在实际使用过程中,有时会因为用户申请了空间,但是在使用完成后没有向系统发出释放的指令,导致存储空间既没有被使用也没有被回收,变为了 无用单元或者会产生 悬挂访问