
软件概览
Point cloud tools for Matlab
Documentation: http://www.geo.tuwien.ac.at/downloads/pg/pctools/pctools.html
Currently included are:
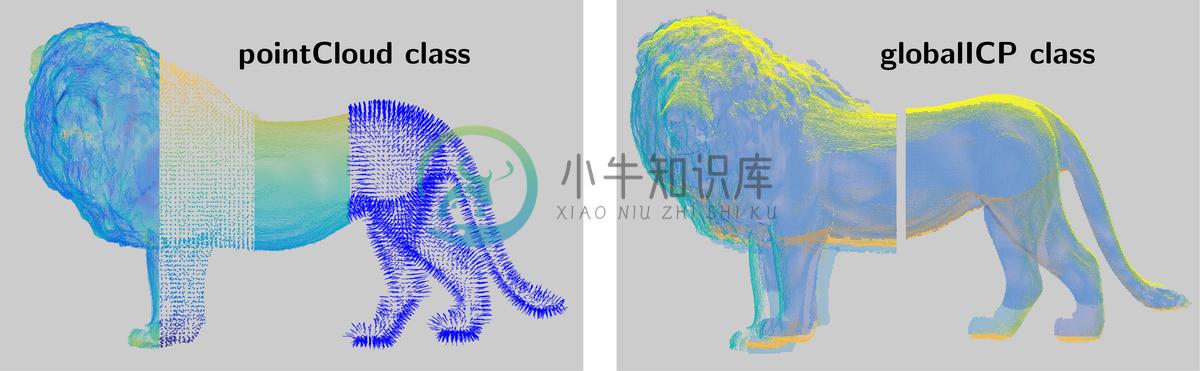
pointCloud class: a Matlab class to read, manipulate and write point clouds
globalICP class: a Matlab class to optimize the alignment of many point clouds with the ICP algorithm
Please cite related papers if you use this code:
@article{glira2015a,
title={A Correspondence Framework for ALS Strip Adjustments based on Variants of the ICP Algorithm},
author={Glira, Philipp and Pfeifer, Norbert and Briese, Christian and Ressl, Camillo},
journal={Photogrammetrie-Fernerkundung-Geoinformation},
volume={2015},
number={4},
pages={275--289},
year={2015},
publisher={E. Schweizerbart'sche Verlagsbuchhandlung}
}
-
仅仅是简单的显示点云,可以使用CloudViewer类。这个类非常简单易用。但要注意,它不是线程安全的。如果要用于多线程,还要参考PCLVisualizer。 需要注意的是,PointCloud的数据类型要和PCD文件中或者代码中的PointT一致! 简单的点云可视化,那么只需要如下几行代码: #include <pcl/visualization/cloud_viewer.h> //...
-
写在最前边,这是对于Point cloud tools for Matlab网页的整理 https://www.geo.tuwien.ac.at/downloads/pg/pctools/pctools.html#PointCloud_class原网页 pointCloud Import of point cloud data.