
Three.js中矩阵和向量的使用教程

前言
提起矩阵,很容易让人想起我们曾经学不会的线性代数和离散数学,但是作为图形开发中的核心部分,它代表着每一次的运动和变换,就像鱼不能脱离水一样,矩阵并不是一个可以避之不谈的话题。
好消息是,Three.js帮助我们把许多矩阵运算封装成了一些顶层的方法,并提供了一个优秀的数学库,我们不太需要知道HowToCalc,只需要知道HowToUse,就可以得到绝大部分我们想要的东西。
这篇文章将要介绍的就是,如何在不了解内部结构的情况下在Three.js中使用矩阵和向量。
从一个例子开始
在讲解一些枯燥的概念前先举一个小例子,来简要说明一下为什么我们要使用矩阵方法。

这是我们最终要完成的效果。
首先,我们要创建三个几何体:
var box_geometry = new THREE.BoxGeometry();
var sphere_geometry = new THREE.SphereGeometry(0.5, 32, 32);
var cylinder_geometry = new THREE.CylinderGeometry(0.1, 0.1, 0.5);
var material = new THREE.MeshLambertMaterial({color: new THREE.Color(0.9, 0.55, 0.4)})
这三个几何体分别是盒子、球和圆柱体。
然后去创建三个网格,并将它们置入场景。
var box = new THREE.Mesh(box_geometry, material); var sphere = new THREE.Mesh(sphere_geometry, material); sphere.position.y += 1; var cylinder = new THREE.Mesh(cylinder_geometry, material); cylinder.position.y += 1.75; scene.add(box); scene.add(sphere); scene.add(cylinder);
这段代码将生成如下场景:

虽然不那么美观,但作为示例已经足够了,现在我希望这堆物体尺寸减半。通常我会把物体的scale属性减半,像这样:
box.scale.multiplyScalar(0.5); sphere.scale.multiplyScalar(0.5); cylinder.scale.multiplyScalar(0.5);

和想象中的有些偏差。我的本意是让这一组物体进行一个整体的缩放,并不想让它们彼此偏离,为了修正这件事,我需要根据其他对象的缩放重新计算每个对象的位置。但这并不是一件很难解决的问题,three.js提供了一种优雅的方式,来处理这个问题。我们可以定义一个空对象,然后将三个对象放在其中,然后将比例应用于父对象。
var pile = new THREE.Object3D(); pile.scale.multiplyScalar(0.5); pile.add(box); pile.add(sphere); pile.add(cylinder); scene.add(pile);

接下来我们做一点更有趣的事。
我将在这个物体组合里添加旋转,让我们尝试围绕球体表面旋转的那个圆柱体,就像他将要滑落一样。

它变成了这样,很明显,这不是我想要的东西。我们在这里有两个做法可供选择:第一,通过数学计算算出圆柱相对于球体的正确位置;第二,创建另一个Object3D,将圆柱和球放进去并旋转。这听上去挺复杂的,而且也很不酷。
所以,我们可以尝试自己去计算矩阵。
首先,我需要将属性maxtrixAutoUpdate设置为false,然后我就不能再通过position,scale和rotation去修改矩阵。
box.matrixAutoUpdate = false; sphere.matrixAutoUpdate = false; cylinder.matrixAutoUpdate = false;
现在,我将用applyMatrix方法来解决这个问题。具体做法是:为每个对象创建一个Matrix4,然后我们将矩阵与该矩阵相乘以应用后续操作。
var sphere_matrix = new THREE.Matrix4().makeTranslation(0.0, 1.0, 0.0); sphere.applyMatrix(sphere_matrix); var cylinder_matrix = sphere_matrix.clone(); cylinder_matrix.multiply(new THREE.Matrix4().makeTranslation(0.0, 0.75, 0.0)); cylinder.applyMatrix(cylinder_matrix);
这几步下来,可以让我们解锁很多知识,来看看这里发生了什么。
首先,我们把盒子单独留下,因为它不需要动。
接着,我创建了一个平移矩阵并把它应用到了球对象上。
最后,在圆柱体上,我clone了球的矩阵信息,并在此基础上又创建了一个新的平移矩阵,圆柱体将移动1.75。

理解了上面几步,你就会知道最后一步该做什么了。
只需要一行代码,作用在球上:
sphere_matrix.multiply(new THREE.Matrix4().makeRotationZ(-Math.PI * 0.25));

达成了想要的效果,很酷。
示例中用到的方法
在上面的示例中,我将球和圆柱体分别沿y轴移动了一定的距离,并使用了makeTranslation这个方法。这个方法的作用是创建了一个平移矩阵。紧接着,我又使用到了applyMatrix的方法。这个方法的作用是把平移矩阵作用在球和圆柱体上。
那么什么是平移矩阵?它又是如何完成一次平移呢?
Three.js中最常见的一种4x4的矩阵,被称为变换矩阵,它所表示的变换类型包括平移、旋转和缩放。
用一个简单的数学题来说明变换矩阵:
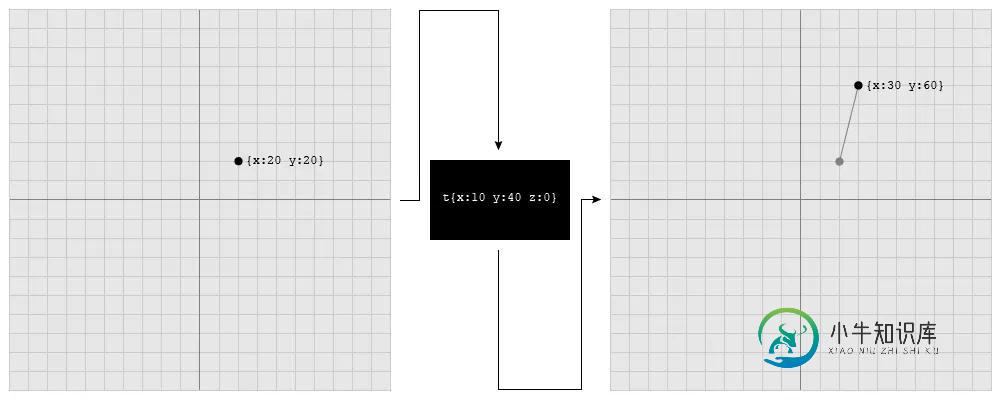
有一个起始点,用向量来表示即为Vector3(20,20,0);现在,我要把它移动到另一个位置,Vector3(30,60,0)。
接下来,我设置一个平移矩阵,来表示向量依照什么方式去移动。
t = |1 0 0 10| |0 1 0 40| |0 0 1 0 | |0 0 0 1 |
最后,用起始的向量去乘以变换矩阵的向量。
|20| |1 0 0 10| |30| |20| x |0 1 0 40| = |60| |0 | |0 0 1 0 | |0 | |1 | |0 0 0 1 | |1 |
变换公式如下:
transformedVector = vector * transformationMatrix
最终的变换向量 = 原始向量 * 变换矩阵
用我们上面例子中的方法来还原这个公式,即:
var vector = new THREE.Vector3(20, 20, 0); var matrix = new THREE.Matrix4(); matrix.makeTranslation(10, 40, 0); vector.applyMatrix4(matrix);
除了平移,Three的API中还提供了rotation和scale,scale变化很简单,它将使用makeScale(x, y, z)这个方法来表示缩放。
而旋转则相对复杂许多,Three.js提供以下旋转方法:
matrix.makeRotationX(angle); matrix.makeRotationY(angle); matrix.makeRotationZ(angle); matrix.makeRotationAxis(axis, angle); matrix.makeRotationFromEuler(euler); matrix.makeRotationFromQuaternion(quaternion);
前三个方法分别代表的是绕X、Y、Z三个轴旋转,无需赘述。
第四个方法是前三个方法的整合版,第一个参数表示的是代表xyz的THREE.Vector3,第二个参数是旋转的弧度。下面两行代码是等价的:
matrix.makeRotationX(Math.PI); matrix.makeRotationAxis(new THREE.Vector3(1, 0, 0), Math.PI);
第五个方法表示围绕x、y和z轴的旋转,这是表示旋转最常用的方式;第六个方法是一种基于轴和角度表示旋转的替代方法。
最后,Three.js api提供了一种方法来创建表示平移,旋转和缩放的组合的矩阵 -- matrix.compose:
var translation = new THREE.Vector3(); var rotation = new THREE.Quaternion(); var scale = new THREE.Vector3(); var matrix = new THREE.Matrix4(); matrix.compose(translation, rotation, scale);
矩阵相乘
矩阵乘法的意义在于叠加。
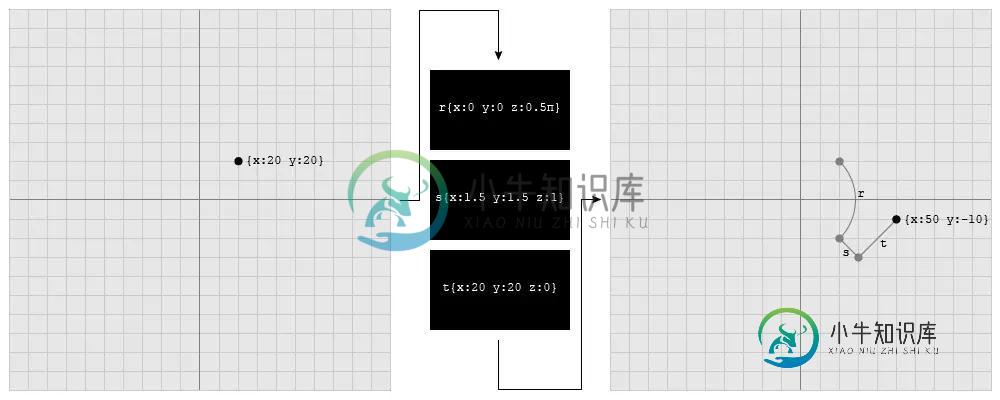
上图表示了三个变化:旋转、缩放和移动。
通过按次序相乘,三个变化矩阵可以得出一个最终的变化矩阵:
combinedMatrix = rotationMatrix * scaleMatrix * translationMatrix;
Three.js里提供了两种矩阵相乘的方法:
- matrix.multiply(otherMatrix)
- matrix.multiplyMatrices(matrixA, matrixB)
第一种方法表示将矩阵乘以另一个矩阵;而第二种方法代表的是将矩阵设置为matrixA * matrixB的结果。
我们在示例中也使用到了第一个方法:将圆柱体的矩阵乘以新的平移矩阵,和将球的矩阵乘以一个旋转矩阵。
需要注意的是,乘法交换律不适用于矩阵乘法,矩阵乘法是具有次序的,先旋转再移动和先移动再旋转的结果是完全不同的。
矩阵的逆
在数字的运算里,除法相当于是乘法的“撤销”操作:
4 x 5 = 20 20 / 5 = 4
但是在矩阵计算里,这个守则同样是不适用的。我们不能用向量去除一个矩阵,我们只能用向量去乘以一个矩阵的逆矩阵,来完成“撤销”的操作。
变化后的向量 = 原始向量 * 变化矩阵;
逆矩阵 = 变化矩阵.inverse();
原始向量 = 变化后的向量 * 逆矩阵;
逆矩阵表示的是相反的变换。
Three.js里提供了一种计算逆矩阵的方法:
var matrix = new THREE.Matrix4(); var inverseMatrix = new THREE.Matrix4(); matrix.getInverse(inverseMatrix);
除此之外,逆矩阵还应用在3D场景中处理相机对象的时候。
最后
矩阵在3D世界里是一种十分强大的工具,它能够将任意变换都表示为一种相似的结构,并采用相同的计算过程。而实际上,矩阵的世界远远比这里介绍的内容更多,希望通过这些简要的介绍,可以让我们进入到一个更深的领域,并游刃有余的利用他处理图形开发中更复杂的场景。
好了,以上就是这篇文章的全部内容了,希望本文的内容对大家的学习或者工作具有一定的参考学习价值,谢谢大家对小牛知识库的支持。
-
下表描述了向量和矩阵乘法函数: 功能 描述 dot_product(vector_a, vector_b) 此函数返回两个输入向量的标量积,其长度必须相同。 matmul(matrix_a,matrix_b) 它返回两个矩阵的矩阵乘积,它必须是一致的,即具有类似(m,k)和(k,n)的维数 Example 以下示例演示了dot产品: program arrayDotProduct real,
-
问题内容: 我想知道最好的方法是用scipy.sparse迭代稀疏矩阵的非零条目。例如,如果我执行以下操作: 输出是 因此看来迭代器正在接触每个元素,而不仅仅是非零条目。我看过API http://docs.scipy.org/doc/scipy/reference/generation/scipy.sparse.lil_matrix.html 并搜索了一下,但是我似乎找不到有效的解决方案。 问题
-
本文向大家介绍Numpy之将矩阵拉成向量的实例,包括了Numpy之将矩阵拉成向量的实例的使用技巧和注意事项,需要的朋友参考一下 废话不多说,直接上代码吧! 以上这篇Numpy之将矩阵拉成向量的实例就是小编分享给大家的全部内容了,希望能给大家一个参考,也希望大家多多支持呐喊教程。
-
我目前正在做一个音频信号处理项目,需要在Java中的一个复杂矩阵上使用SVD。我当前的线性代数库是Apache Commons。但它只提供实矩阵的SVD,JAMA、JBLAS、EJML、ojAlgo都不支持复杂的SVD。 我一直在用一些技巧从一个等效的实矩阵中找到SVD。然而,当我重建矩阵时,这种技术对于虚部有很大的不准确性。
-
我在查看一些代码时发现了以下内容: 有什么区别呢?顺便说一句:我对矩阵很陌生
-
本文向大家介绍numpy.linalg.eig() 计算矩阵特征向量方式,包括了numpy.linalg.eig() 计算矩阵特征向量方式的使用技巧和注意事项,需要的朋友参考一下 在PCA中有遇到,在这里记录一下 计算矩阵的特征值个特征向量,下面给出几个示例代码: 在使用前需要单独import一下 官方文档链接:http://docs.scipy.org/doc/numpy/reference/g