
Android Camera2采集摄像头原始数据

最近研究了一下android摄像头开发相关的技术,也看了Google提供的Camera2Basic调用示例,以及网上一部分代码,但都是在TextureView等预览基础上实现,而我想要做的是在不预览的情况下,能获取到摄像头原始数据流,并由自己来决定是否绘制显示。经过一番折腾,初步实现了自己的目的—CamCap程序。
需求分析
其实主要就是在不预览的情况下获取到摄像头原始数据,目的嘛,一是为了灵活性,方便随时开启关闭预览,二是为了以后可以直接对数据进行处理,三是为了其他程序开发做一些准备。于是实现一下几个功能:
获取摄像头数据,并手动绘制图像 随时开启/关闭预览 随时保存当前摄像头图像,即使在关闭预览情况下 Android Camera2接口
查阅了一些资料,Android Java层由于从API21开始,已经废弃原Camera接口,所以这里采用Camera2接口。相比Camera接口来说,第二代摄像头接口,调用复杂多了,但是灵活性也更高了,通过Google的Camera2Basic例子可以很清楚的了解到使用方式。这里把CamCap程序中的Camera2的调用顺序整理如下:
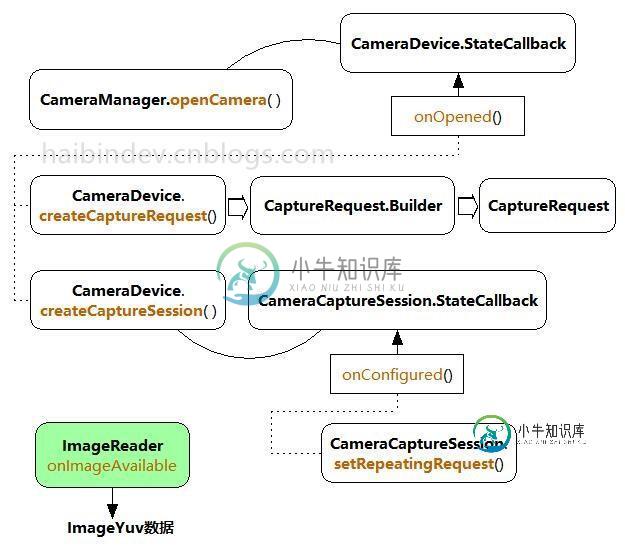
和其他程序一样,通过ImageReader来获取到CameraCaptureSession传递出来的数据,与Google例子不同的是,我取消了把TextureView的传递,改为单独以ImageReader来获取图像流,并设置为YUV_420_888格式,以拿到原始数据。
打开摄像头

摄像头打开后,创建对话

调用libyuv做RGB之间的数据转换
获取到YUV数据之后,就可以在UI界面上进行绘制了,通过简单了解,可以通过OpenGLES来绘制,也可以转为Bitmap直接在TextureView上绘制。这里为了简单,选择了后者。然而后来发现,android.graphics.Bitmap并不支持直接将YUV数据存入,只能转为RGB数据格式,才能存入Bitmap,进而在TextureView上绘制。YUV转换RGB,之前在C++上应用过很多次了,可以把现有代码修改一下放到java里运行,不过考虑到性能问题,决定还是使用libyuv。libyuv是一款以c/c++为基础的,专做YUV与RGB格式转换的开源项目,性能非常高。
使用libyuv,需要通过NDK交叉编译,并通过JNI来调用。libyuv编译起来也很简单,首先下载libyuv源码,代码地址是:https://chromium.googlesource.com/libyuv/libyuv 。然后确保NDK已经安装(这个直接在AndroidStudio中就能安装好),之后把NDK目录添加到环境变量。最后,进入libyuv目录,调用ndk-build即可。libyuv项目里已经写好了Android.mk,所以,直接编译就行了(我是在Windows上)。
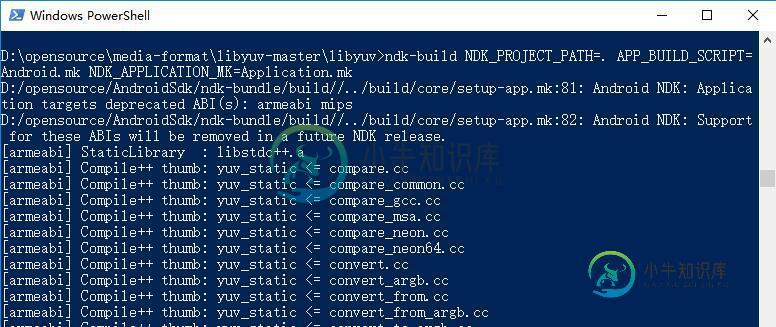
注意!编译的时候遇到JPEG库没有指定的问题,如果不想依赖libjpeg,可以修改Android.mk,删除JPEG库相关编译项就可以解决。
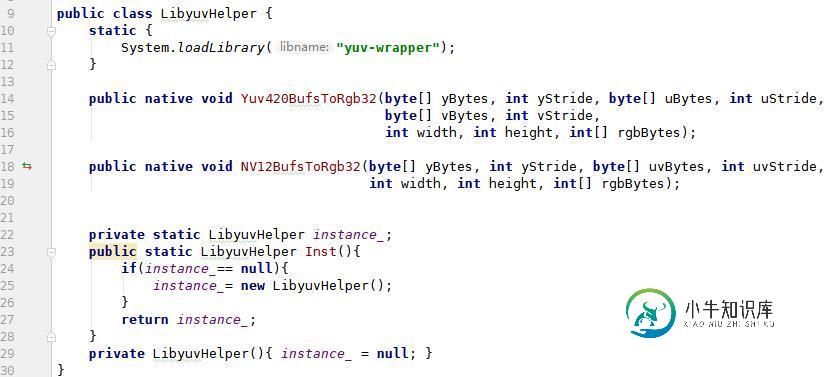
在AndroidStudio上建立c++文件,封装libyuv接口,然后按照JNI规范暴露接口,同时在Java层封装类来调用native方法。
绘制图像
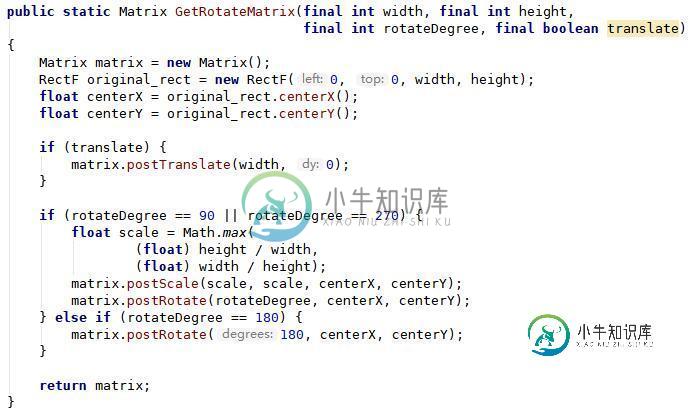
在绘制图像的时候,有个坑,那就是图像的旋转,这个是由于手机上的摄像头传感器的视野坐标,一般都是旋转了90度或270度的,所以,需要把摄像头采集到的画面,进行旋转,才能还原出正确的视野画面。传感器旋转方向通过以下值获得,
CameraManager.getCameraCharacteristics(camid).get(CameraCharacteristics.SENSOR_ORIENTATION)
根据这个值,构建Matrix将Bitmap进行旋转
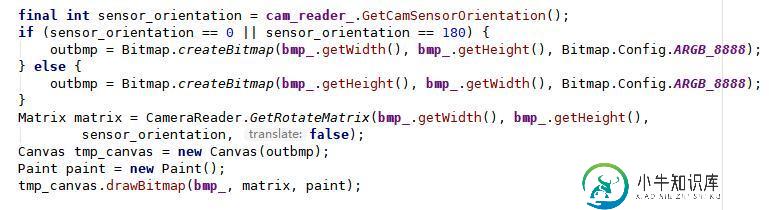
Matrix构建代码如下:
与上面代码中类似,通过TextureView.lockCanvas(),获取到Canvas,调用drawBitmap()将图像写入,即可完成绘制。
运行截图
开启预览时的4:3画面和16:9画面
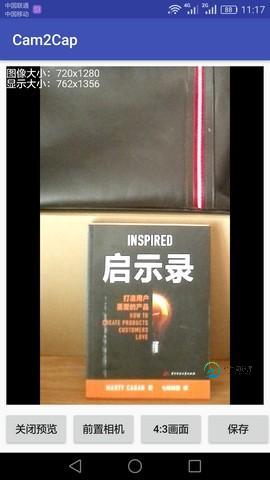

关闭预览,同时可以继续拍照

-
本文向大家介绍C# 利用AForge实现摄像头信息采集,包括了C# 利用AForge实现摄像头信息采集的使用技巧和注意事项,需要的朋友参考一下 概述 AForge.NET是一个专门为开发者和研究者基于C#框架设计的,提供了不同的类库和关于类库的资源,还有很多应用程序例子,包括计算机视觉与人工智能,图像处理,神经网络,遗传算法,机器学习,机器人等领域。本文主要讲解利用AForge进行图像采集的相关内
-
表情测试 图片转文字 相框 拍摄图片
-
摄像头用于采集图像和影像信息,通过模块间的组合完成各种创意活动。 净重量:8.1g 体积:24×24×22mm 参数 分辨率:1280×720 像素大小:3.4um×3.4um 最大图像传输速率:全尺寸 @ 30fps 视场角:100° 镜片结构:4G+IR 焦比:2.97 有效焦距:2.4mm 功耗:100uA(待机)~240mW(工作) 电源:USB总线电源 抗跌落能力:1m 工作温度:-30
-
camera 对象提供对设备默认摄像头应用程序的访问。 方法: camera.getPicture 参数: cameraSuccess cameraError cameraOptions camera.getPicture 选择使用摄像头拍照,或从设备相册中获取一张照片。图片以base64编码的字符串或图片URI形式返回。 简单的范例: navigator.camera.getPicture( c
-
摄像头 打开摄像头 Tida.photo({ // 暂不支持参数传入 }, function (data) { if (data.errorCode) { console.error(data.errorCode, data.errorMessage); } else { var img = document.createElement('i
-
主要内容:第1步:加载OpenCV本机库,第2步:实例化视频捕获类,第3步:阅取帧,示例在本章中,我们将学习如何使用OpenCV使用系统摄像头捕获帧。包中的类包含使用相机捕获视频的类和方法。下面来一步一步学习如何捕捉帧 - 第1步:加载OpenCV本机库 在使用OpenCV库编写Java代码时,使用加载OpenCV本地库。加载OpenCV本机库,如下所示 - 第2步:实例化视频捕获类 使用本教程前面提到的函数来实例化类。 第3步:阅取帧 可以使用类的方法从相机读取帧。此方法接受类的对