《镜像》专题
-
 wsl2 - 如何手动安装wsl镜像?
wsl2 - 如何手动安装wsl镜像?目的:安装wsl 问题:公司网络做了限制,无法通过app store安装 设想:是不是能手动下载一个wsl镜像手动安装 问题:没找到这类教程 尝试:各种翻过公司网络的方式都尝试了,没成功 更新:找了个ubuntu的镜像,下载安装后报错如下
-
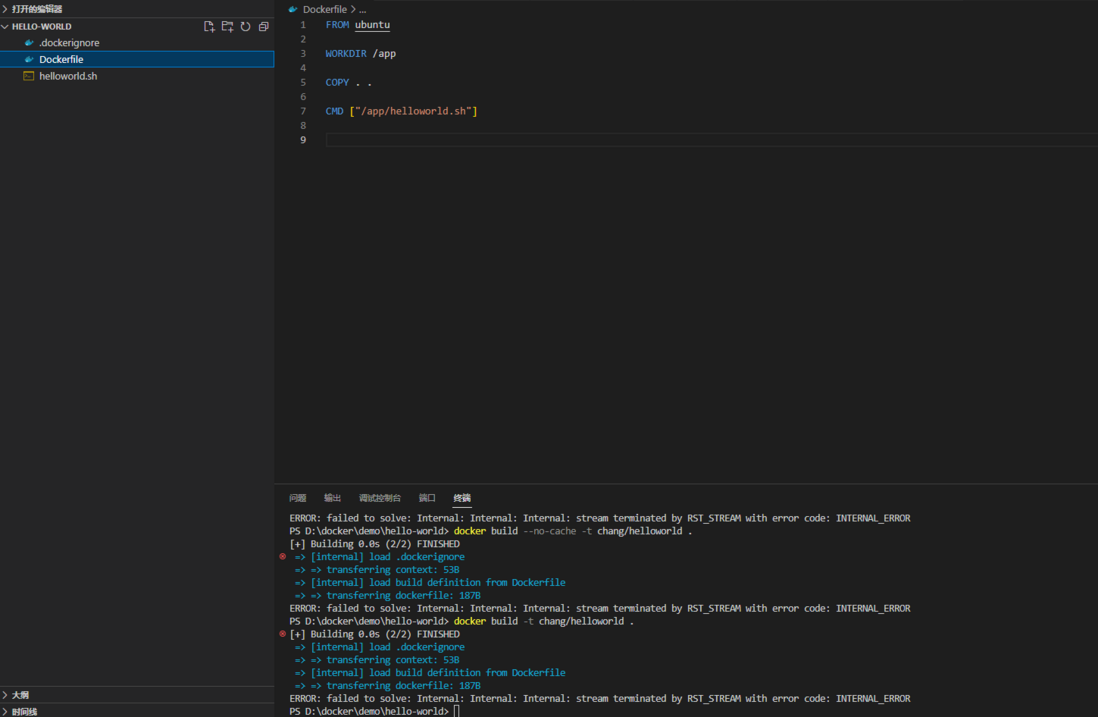 docker 构建镜像出现 INTERNAL_ERROR 失败?
docker 构建镜像出现 INTERNAL_ERROR 失败?功能是使用一个基础的操作系统,然后执行一个 shell 脚本。.dockerignore 是空的,删除了或者加内容依然会报错,应该对构建是否成功没有影响。 shell 脚本 报了以下的错误 如果是使用官方文档提供的应用例子,按流程执行是没有问题的。例如 这是没有问题的 这个简单例子为什么会报错? 好像解决了问题,但是问题的原因更加摸不着头脑,就是换一个目录就没有问题了
-
如何包装成一个docker镜像?
有一个应用是这样安装的,以root身份登陆vps(debian11): 我可否为这个应用制作一个docker镜像呢?用docker run来达到我上面那些代码的目的? 报错了 我的镜像源 我的本地代理可以使用 在构建镜像时,使用代理 还是报错
-
哪个docker镜像源质量最好?
不知道大家用哪个? 我配置了这三个,但是速度还是很感人 非云主机
-
春批式步进镜豆
如何准确定义步骤作用域bean的生命周期,尤其是当我已经划分了作用域时? 例如: null 问题是:假设一个简单的流(读、处理、写、完成),将创建多少并行步骤?4个平行步骤?是否每一步都有自己的RepositoryItemReader,所以结果会有4个RepositoryItemReader?
-
实现棱镜点物理
我正在尝试为我用C语言开发的一个应用程序——OpenframeWorks——实现我自己的物理功能。我目前正在使用Box2D,但我不需要碰撞检测,所以我想要更轻的东西。 我有一个有重力的世界和一个动态物体,它的运动受到一个任意长度和任意角度的棱柱形关节的约束,连接到一个静态物体上。摩擦是用关节马达模拟的。 我看过 2D游戏物理资源 但这里的一切似乎都集中在构建完整的物理引擎上,我不需要这样做。有人能
-
Spring Cloud Eureka Netflix zuul滤镜
我有三个spring boot微服务,它们使用spring Eureka server和zuul作为网关。我有auth微服务,这是zuul网关,验证用户。我有另外两个服务在不同的端口运行。如果我通过zuul网关调用,我可以在jwt的帮助下保护这两个服务,但由于我知道两个微服务端口和url,我可以直接调用并获得响应,而不需要通过网关url。所以我如何保护这两个微服务。请帮助我分享两个微服务之间的安全
-
32 滤镜链图描述
滤镜链图介绍 一个滤镜链图(filtergraph)是连接滤镜的有向图。它可以包含循环动作,也可以在多个滤镜间形成链路,每个链接都有一个连接到滤镜的输入和一个连接到滤镜的输出。 滤镜链图中的每个滤镜都是一个滤镜注册类应用程序的实例,它定义了滤镜的功能、输入接口和输出接口。 如果滤镜没有输入端(接口),则被称作“源”,如果滤镜没有输出端则被称作“槽”(这样的滤镜用于描述/测试等场景,而不用于实际处理
-
Photoshop 滤镜效果参考
注意:有关某些滤镜的使用方法的完整信息可在其它章节中找到。有关“锐化”、“模糊”、“镜头校正”、“镜头模糊”、“减少杂色”、“液化”和“消失点”滤镜的信息,请搜索 Adobe 帮助。 支持 16 位/通道和 32 位/通道文档的滤镜列表 以下滤镜支持 16 位/通道和 32 位/通道文档: 所有“模糊”滤镜(不包括“镜头模糊”和“特殊模糊”) 所有“扭曲”滤镜 “杂色”>“添加杂色”滤镜 所有“像
-
 黑镜科技(tita)校招
黑镜科技(tita)校招### 一面 - 项目 - 项目里做了哪些优化 - 封装过哪些组件 - 项目深入 - 扁平化数组内容转成树形结构 - 服务端渲染了解吗? - 服务端渲染有几种方式 - vue2和vue3的区别 - vue3 不同API是浅层监听还是深层监听 - 说五个语义化标签 - 垂直水平居中 - position 设置为0, margin设置auto,为什么能实现垂直水平居中 - 实现动画有几种方式 - di
-
 LOHO眼镜设计 面经
LOHO眼镜设计 面经今天去了LOHO眼镜公司面试,接下来是我的一个面试流程。只是客观的陈述,希望对要去面试的人有帮助。 在邀约面试之前,已经和HR做了简单的线上沟通。我面试的是设计主创,但后面沟通说是创意设计,其实都还好。 首先,HR和我做了个简单的面试,算是入门吧!后面才是重头戏。HR问的问题都是比较普通和常见的,相信一般人去都没太大问题。HR人非常好,非常热情。 然后第二轮,一个品牌策划人员和我面试,当时听到,额
-
iOS放大镜(带阴影)
一个具有立体阴影的通用放大镜视图,可对手指触摸位置处局部放大,效果与iOS自身的文本编辑框放大镜相同。支持自动避让,以动画效果跳转。 功能特性: 圆形放大镜,右下角带阴影(区别于另一项目,官方版本也没阴影),放大显示触摸位置的视图内容。 两种自动走位:实时跟随触摸位置、固定在左上角(触摸离得近时自动避让,以动画效果避让)。 可指定放大倍数,默认是1.5倍。 快速触摸时不显示放大镜,持续触摸超过
-
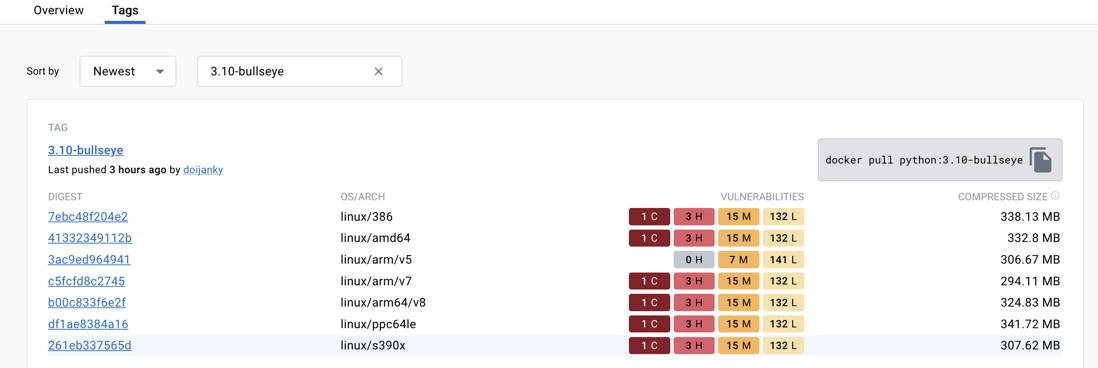 python - 为什么刚刚拉取的 docker 镜像的 digest 镜像和 docker hub 上的不一致?
python - 为什么刚刚拉取的 docker 镜像的 digest 镜像和 docker hub 上的不一致?https://hub.docker.com/_/python/tags?page=1&name=3.10-bullseye 上面是 docker hub 中,python:3.10-bullseye 的 digest 信息 下面是刚刚执行 docker pull python:3.10-bullseye 输出的 digest 信息 可以看到,本地拉取的 Digest 是 e917e3e93525
-
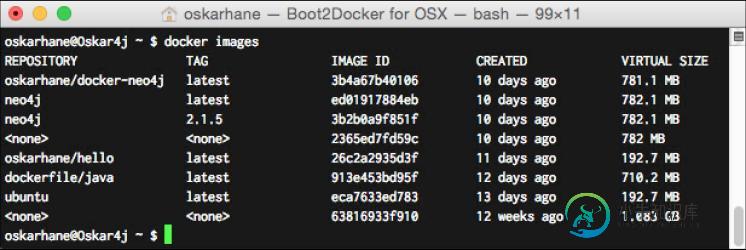 Docker 镜像和容器的区别详解
Docker 镜像和容器的区别详解本文向大家介绍Docker 镜像和容器的区别详解,包括了Docker 镜像和容器的区别详解的使用技巧和注意事项,需要的朋友参考一下 最近学习Docker,被Docker 的镜像和容器搞的晕头转向,索性上网查找相关资料并整理下彻底的理解这块内容,有需要的小伙伴可以看下,少走点弯路。 Docker的镜像和容器的区别 一、Docker镜像 要理解Docker镜像和Docker容器之间的
-
Codingbat挑战:使用流API实现镜像
给定CodingBat的任务镜像: 给定一个字符串,请在给定字符串的开头和结尾处查找镜像(向后)字符串。 换句话说,在给定字符串的最开始,以及在字符串的最末尾以相反的顺序(可能重叠)出现零个或多个字符。例如,字符串具有镜像结尾。 示例: 我对此任务的解决方案如下: 是否可以使用Stream API解决此问题?