
叮当是一款可以工作在 Raspberry Pi 上的中文语音对话机器人/智能音箱项目。
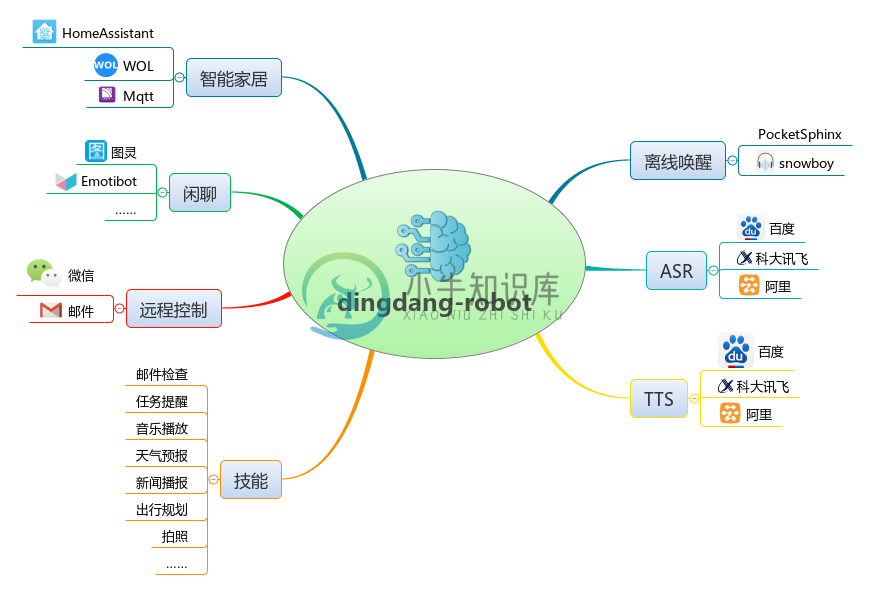
叮当包括以下诸多特性:
模块化。功能插件、语音识别、语音合成、对话机器人都做到了高度模块化,第三方插件单独维护,方便继承和开发自己的插件。
微信接入。支持接入微信,并通过微信远程操控自己家中的设备。
中文支持。集成百度、科大讯飞、阿里、谷歌等多家中文语音识别和语音合成技术,且可以继续扩展。
对话机器人支持。支持接入图灵机器人、Emotibot,未来还将支持接入更多机器人。
全局监听,离线唤醒。支持无接触地离线语音指令唤醒。
灵活可配置。支持定制机器人名字,支持选择语音识别和合成的插件。
智能家居。集成 HomeAssistant 插件,支持语音控制智能家电。
叮当的工作模式:
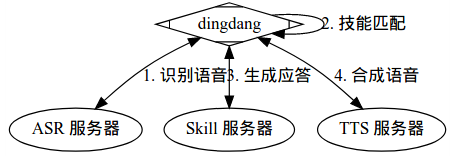
叮当被唤醒后,用户的语音指令先经过在线 STT 引擎进行 ASR 识别成文本,然后对识别到的文本进行技能匹配,交给适合处理该指令的技能插件去处理。插件处理完成后,得到的结果再交给 TTS 引擎合成成语音,播放给用户。
虽然一次交互可能包含多次网络请求,不过带来的好处是:每一个环节都可以被修改和定制。
硬件要求
Raspberry Pi 全系列,或其他 Linux 主机;
USB 麦克风(建议选购麦克风阵列);
音箱(不建议蓝牙音箱);
至少 8G 的 Micro-SD 内存卡(刷镜像要求内存卡的实际容量至少 7.9 GB,否则可能刷不成功);
摄像头(可选,用于拍照)。
读卡器(可选,用于刷镜像进内存卡)。
-
叮当是一款可以工作在 Raspberry Pi 上的开源中文语音对话机器人/智能音箱项目,目的是让中国的Hacker们也能快速打造个性化的智能音箱。 github地址: https://github.com/wzpan/dingdang-robot 主要是github上已经提供了打包好的镜像文件,只需少量操作,烧录进入sd卡即可使用体验,推荐给大家! 特性 叮当包括以下诸多特性: 模块化。功能插件
-
背景 该项目的前身是dingdang-robot,一个开源中文语音对话机器人/智能音箱项目。因为 dingdang-robot 本身维护上的困难,作者将项目迁移到了 dingdang-robot 组织交由社区进行维护。很遗憾的是,即使迁到了 dingdang-robot 组织,由于组织维护者们都并不是全职维护这个项目,而且硬件和操作系统上的差异始终给 dingdang-robot 的维护带来了很大
-
欢迎大家前往腾讯云社区,获取更多腾讯海量技术实践干货哦~ 作者:潘伟洲 免责说明:本文介绍的 dingdang-robot 与公司的叮当助手没有任何关系。 这个项目其实来源于我生活中的一个需求:我每天晚上都会去厨房做一个面包当明天的早餐,当我把用料按顺序准备好放进面包机时,我需要准确预约到明天早上我吃早餐的时间。然而,几乎每次在这个时候我都没有带手机在身边,而是都放在客厅里充电,这时只能跑去客厅看
-
我正在尝试使用Robot类创建一个游戏机器人。我尝试了以下代码来执行鼠标的右键单击: 而且奏效了。 我正在客户端3D在线游戏上测试它。 按下键“1”应该在Game中执行某种移动,当我尝试下面的代码时,它不起作用: 但当我在游戏中聊天时使用该代码时,它确实起了作用。 它被测试了一遍又一遍,我得到了同样的结果。 是我做错了什么吗?还是游戏发现我不是那个按下那个键的人。
-
尝试制作一个简单的音乐机器人,只播放一个链接,但它不连接到语音通道,因此不会出现任何错误,所以我只能放入所有代码。这是我的主要内容。js公司 这是我的音乐机器人命令,我认为它是正确的,因为我已经在这里请求了一些人的帮助。
-
我正在考虑制作一个应用程序,我可以使用它来使用语音命令控制我的Arduino机器人(通过蓝牙/wifi)。但是为了使体验流畅,我需要Android应用程序语音识别持续运行。如果我想让机器人停止,我不想按下按钮,等待语音识别对话框出现,说出我的命令“STOP”,释放按钮,等待解析器解析它,然后发送停止命令。 当我控制我的机器人时,我宁愿让语音转文本处于连续收听模式。当它听到关键字时,它会发送它们。
-
我希望我的不和谐机器人加入语音频道。但是我遇到了一个问题,每当我想让它加入风投时,什么都不会发生——甚至没有错误。我尝试过SO/Git的其他解决方案,但没有一个适合我(下面有一个)。 编辑:解决了!问题是:没有不和。已安装py[语音]模块。解决方案:
-
[...] 置疑计算机能不能思考 [...] 就相当于置疑潜艇能不能游泳。 艾兹格尔·迪科斯特拉,《计算机科学的威胁》 在“项目”章节中,我会在短时间内停止向你讲述新理论,相反我们会一起完成一个项目。 学习编程理论是必要的,但阅读和理解实际的计划同样重要。 我们在本章中的项目是构建一个自动机,一个在虚拟世界中执行任务的小程序。 我们的自动机将是一个接送包裹的邮件递送机器人。 Meadowfield
-
我有一个叫“土豆音乐”的音乐机器人,它是一个音乐机器人。目前,机器人按照我希望的方式执行命令。但是一旦我停止在本地托管机器人并将其部署在Heroku上,就有一些错误开始出现。 我有一个名为“播放”的命令,每当我执行该命令时,它都应该在语音频道上播放歌曲。命令在命令开头有一个条件,用于检查用户是否已经在语音频道中。但是在我在Heroku上托管了这个机器人之后,一旦我执行命令,它就会一直告诉我我没有连