
OpenGL ES透视投影实现方法(四)

在之前的学习中,我们知道了一个顶点要想显示到屏幕上,它的x、y、z分量都要在[-1,1]之间,我们回顾一下渲染管线的图元装配阶段,它实际上做了以下几件事:剪裁坐标、透视分割、视口变换。图元装配的输入是顶点着色器的输出,抓哟是物体坐标gl_Position,之后到光栅化阶段。
图元装配
剪裁坐标
当顶点着色器写入一个值到gl_Position时,这个点要求必须在剪裁空间中,即它的x、y、z坐标必须在[-w,w]之间,任何这个范围之外的点都是不可见的。
这里需要注意以下,对于attribute类型的属性量。OpenGL会用默认的值替换属性中未指定的分量,前三个分量会被设定为0,最后一个分量w会被设定为1.
站在gl_position的角度来说,[-w,w]之间的坐标点才是可见的,否则都是不可见会被剪裁掉。往前看,在做投影变换的时候我们说,在视景体内的物体有效,视景体外的会被剪裁,实际上是对应的,剪裁就是发生在图元装配阶段判断所有的坐标是否在[-w,w]之间。
剪裁实际上就是判断每一个最小三角形、直线、点单元的坐标是否规范。
透视除法
对上面的剪裁坐标的点的x、y、z坐标除以它的w分量,除以w的坐标叫做归一化设备坐标。如果w分量大,除以w后的点就接近(0,0,0),在三维空间中,距离我们较远的坐标如果它的w分量较大,进行透视除法后,就距离原点越近,原点作为远处物体的消失点,就有三维场景的效果。
视口变换
前面已经使用过视口变换的函数glViewport了,视口是一个而为矩形窗口区域。是OpenGL渲染操作最终显示的地方。
public static native void glViewport( int x, int y, int w, int h );
从归一化设备坐标(x,y,z)到窗口坐标(X,Y,Z)的转换公式

上面公式中的f和n是如下API设置的
public static native void glDepthRangef( float n, float f );
n,f指定所需的深度范围,n,f的取值限于(0.0,1.0)之间,n,f的默认值为0.0和1.0
glDepthRangef函数和glViewport函数指定的值用于将顶点位置从归一化设备坐标转换为窗口坐标。
利用w分量产生三维效果
在前面的代码中,修改传入的顶点坐标,增加w分量
float[] vertexArray = new float[] {
(float) -0.5, (float) -0.5, 0, 1,
(float) 0.5, (float) -0.5, 0, 1,
(float) -0.5, (float) 0.5, 0, 3,
(float) 0.5, (float) 0.5, 0, 3
};
同时修改顶点着色器:
private String vertexShaderCode = "uniform mat4 uMVPMatrix;"
+ "attribute vec4 aPosition;"
+ "void main(){"
+ "gl_Position = uMVPMatrix * aPosition;"
+ "}";
以及获取uProjectionMatrix以及传入顶点数据对应的代码,就可以看到如下所示效果
透视投影
然而这样让物体产生三维效果的做法太死板了,如果我们还要让物体平移缩放旋转,这样固定的指定w的值就不太好了。
透视投影这个时候就能派上用场了,利用透视投影矩阵自动生成w的值。投影矩阵主要是为w产生正确的值,这样在渲染管线的后续操作中做透视除法,远处的物体就看起来比进出物体小,很容易想到,可以利用顶点位置的z分量,将这个距离映射到w分量上,z越大,w也越大。
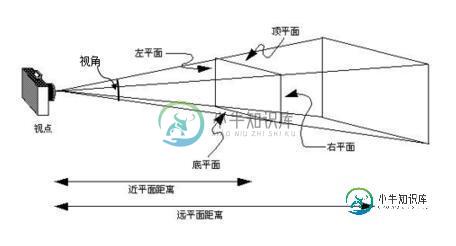
有两个函数可以生成透视投影矩阵frustumM和perspectiveM。参数具体含义可以参考下面的图
public static void perspectiveM(float[] m, // 生成的投影矩阵
int offset,
float fovy, // 视角角度
float aspect, // 近平面的宽高比
float zNear, // 近平面
float zFar) // 远平面
frustumM函数原型
public static void frustumM(float[] m, int offset, float left, float right, float bottom, float top, // 近平面左右下上部与中心点的距离 float near, float far //近平面和元平面与摄像机观察点的距离 )
透视投影背后的数学原理
创建下面的矩阵
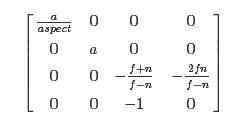
a表示视角焦距,焦距等于1/tan(视野/2)
取aspect=1.8,视野45度即a = 1,f = 10,n = 5,得到的透视投影矩阵为
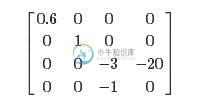
计算下面几个点
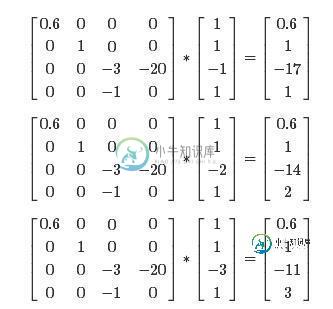
上面这三个点越来越远,通过透视投影后,z和w都变大了,可以想到,在后面的透视除法时,x和y分量都会变小,于是就会出现距离越远,汇聚到一个点,也就是三维效果。
同时也可以看到,上面的几个点他们的z坐标都是负值,这也从侧面表达了,事实上所有的有效的点z坐标必须是负值,也就是从摄像机的坐标来看是在z轴负方向,也就是必须在视景体里面,这一点通过摄像机矩阵来保证。
前面使用正交投影,它的矩阵不会使得w粉量增加,于是通过透视除法也不会使w分量增加,所以正交投影不会出现近大远小的效果,透视投影会出现近大远小的效果
透视投影例子
在上面矩形Demo的基础上修改上面的正方形的顶点数据
float vertices[] = new float[] {
(float) -0.5, (float) -0.5 + + (float)(-0.1*i), (float) (1*i),
(float) 0.5, (float) -0.5 + + (float)(-0.1*i), (float) (1*i),
(float) -0.5, (float) 0.5 + + (float)(-0.1*i), (float) (1*i),
(float) 0.5, (float) 0.5 + + (float)(-0.1*i), (float) (1*i)
};
在绘图时,定义一个数组,传递不同的i值,比如绘制四个正方形,这四个正方形的距离越来越远。
mRectangles = new Rectangle[5];
for (int i = 0; i < mRectangles.length; i++) {
mRectangles[i] = new Rectangle(i);
}
在onSurfaceChanged函数里面设置摄像机位置和透视投影矩阵
Matrix.perspectiveM(mProjectionMatrix, 0, 45, (float)width/height, 2, 15); Matrix.setLookAtM(mViewMatrix, 0, 0, 0, 12, 0, 0, 0, 0, 1, 0);
然后在onDrawFram函数里面绘制这5个矩形
for (Rectangle rectangle : mRectangles) {
Matrix.setIdentityM(mModuleMatrix, 0);
Matrix.rotateM(mModuleMatrix, 0, xAngle, 1, 0, 0);
Matrix.rotateM(mModuleMatrix, 0, yAngle, 0, 1, 0);
Matrix.multiplyMM(mViewProjectionMatrix, 0, mProjectionMatrix, 0, mViewMatrix, 0);
Matrix.multiplyMM(mMVPMatrix, 0, mViewProjectionMatrix, 0, mModuleMatrix, 0);
rectangle.draw(mMVPMatrix);
}
为了呈现出3d效果,增加触摸旋转事件,这样滑动屏幕就可以看到三维物体的全貌
public boolean onTouchEvent(MotionEvent e) {
float y = e.getY();
float x = e.getX();
switch (e.getAction()) {
case MotionEvent.ACTION_MOVE:
float dy = y - mPreviousY;
float dx = x - mPreviousX;
mMyRender.yAngle += dx;
mMyRender.xAngle+= dy;
requestRender();
}
mPreviousY = y;
mPreviousX = x;
return true;
}
然后就可以看到三维效果。
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持小牛知识库。
-
举个简单的例子来说明正交投影与透视投影照相机的区别。使用透视投影照相机获得的结果是类似人眼在真实世界中看到的有“近大远小”的效果(如下图中的(a));而使用正交投影照相机获得的结果就像我们在数学几何学课上老师教我们画的效果,对于在三维空间内平行的线,投影到二维空间中也一定是平行的(如下图中的(b))。 (a)透视投影,(b)正交投影 那么,你的程序需要正交投影还是透视投影的照相机呢? 一般说来,对
-
在这一节中我们将会介绍如何在保持深度外观的情况下将三维世界中的物体投影到二维平面上去。最有代表性的例子是:当我们站在一条笔直的马路的中间向前看时,我们会发现马路的两边会越来越靠近,并最终汇聚成一个点。这就是图形学中常说的透视投影。 为了实现上面的效果,在本节中我们需要生成一个投影矩阵,这个投影矩阵需要满足能够将所有的顶点都投影到范围位于 -1 到 1 之间的规范化空间中(normalizedspa
-
透视投影照相机(Perspective Camera)的构造函数是: THREE.PerspectiveCamera(fov, aspect, near, far) 让我们通过一张透视照相机投影的图来了解这些参数。 透视图中,灰色的部分是视景体,是可能被渲染的物体所在的区域。fov是视景体竖直方向上的张角(是角度制而非弧度制),如侧视图所示。 aspect等于width / height,是照相
-
针对不同应用的三维场景需要使用不同的投影方式,比如机械、工业设计领域常常采用正投影(平行投影), 大型游戏场景往往采用透视投影(中心投影)。为了完成三维场景不同的投影方式,three.js封装WebGL API和相关算法,提供了正投影相机OrthographicCamera和透视投影相机PerspectiveCamera。 正投影和透视投影简单解释 下面对正投影相机和透视投影相机的投影算法进行简单
-
我刚刚学习了透视投影,并且发现在openGl中应用它有点令人困惑。 考虑一个简单的正方形。<br>在使用透视投影之前,我可以定义其顶点在[-1,1]空间中的坐标,对于{0.0f,0.0f,0.0 f,1.0f、1.0f、1.0 f、1,0.0 F}的输入,该正方形将占据窗口的第一象限 考虑我的代码中的以下部分: 设置矩阵: 制服: 顶点着色器: 但是,结果是一个空白屏幕 我需要在此应用哪些额外的转
-
本文向大家介绍OpenGL ES正交投影实现方法(三),包括了OpenGL ES正交投影实现方法(三)的使用技巧和注意事项,需要的朋友参考一下 本文实例为大家分享了OpenGL ES正交投影展示的具体代码,供大家参考,具体内容如下 绘制正方形 在最开始绘制的六边形里面好像看起来挺容易的,也没有出现什么问题,接下来不妨忘记前面绘制六边形的代码,让我们按照自己的理解来绘制一个简单的正方形。 按照我的理