《线性表》专题
-
线程二叉树
大家好,我应该编写ThreadedNode()类,但是我遇到了一些问题。 我理解,一个二叉树的线程二叉树是通过在顺序遍历中将每一个null左子级设置为节点的前导,在顺序遍历中将每一个null右子级设置为节点的后继来获得的。 但是,我的问题是从构造函数//线程(二叉树)开始的,当您被赋予根公共线程节点(BinaryNode根) 我知道它接收一个binaryNode,我必须使它成为一个线程树,但我如何
-
用画布画线
在IE9画布中现在是否支持虚线/点线?目前我正在做与以下内容非常相似的事情: 这在IE7、IE8、IE9兼容模式和FireFox中工作很好,然而,在IE9和Chrome中,为每条虚线绘制一个实心笔画。 对为什么会发生这种情况有什么想法吗?
-
单线单熔剂
-
Vertx线程模型
我有两个问题与Vertx线程模型有关。文件提到: 一个顶点。默认情况下,x实例维护N个事件循环线程(其中N默认为core*2) 对于许多现代应用程序所需的并发级别,阻塞方法无法扩展 Vertx还提供了线程池相关的功能,以处理使用服务器资源的任务,这些资源需要长时间的事件处理(工作线程)。 好的,所以我们知道线程在所需内存(例如堆栈)和上下文切换方面有开销。 Vertx线程没有被阻塞(如果正确使用)
-
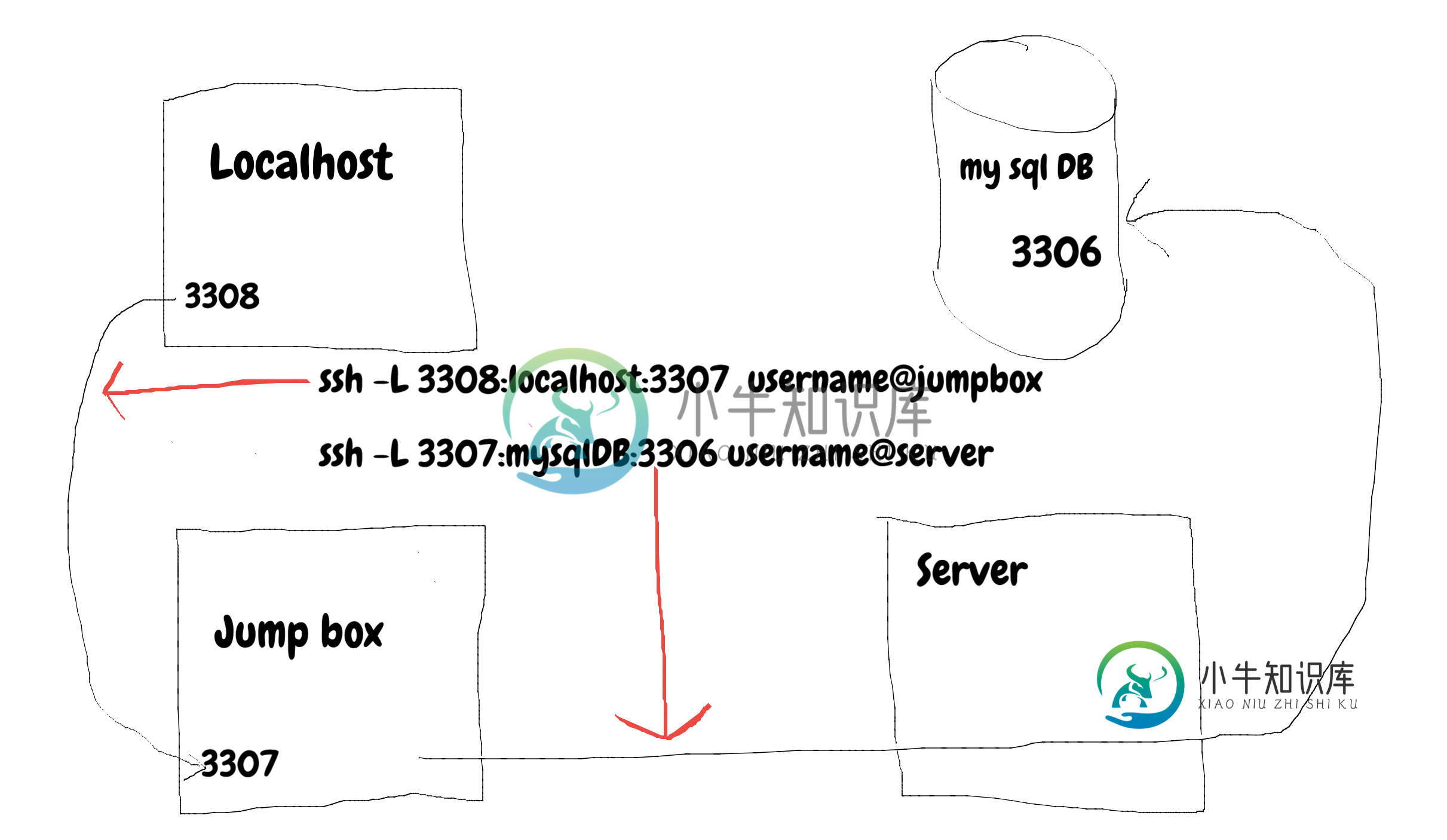 多隧道/跳线
多隧道/跳线我不确定这是否是由端口转发使用私钥而不是密码造成的,但下面是我正在尝试做的 我需要将本地端口3308一直转发到位于3306的my SQL DB。 我可以在我的本地终端上一起运行这样的事情 我在JSch或端口转发方面做错了什么吗?
-
Java线程队列
我需要一个库或我们的软件工具,可以: 1)将线程/作业/任务(任何东西--如果需要,我们可以重写代码,我们在mintue有线程对象)放入像system这样的队列中2)我们可以定义同时最多运行多少线程3)线程完成后,线程从队列中移除,这样GC就可以移除所有涉及的实体。 我正在进行大量阅读,发现ExecutorService(Executors.newFixedThreadPool(5);)但问题可能
-
Android/Java线程Hibernate
除了隐式用户界面线程之外,我还制作了两个线程(可运行的),它们内部都有一个 while 循环,我定期检查我实现的消息队列中的更新。 一开始的问题是这两个while循环是无限的,它们变化得如此之快,如此之多,几乎耗尽了设备的所有CPU。所以我考虑让while循环在每个周期后Hibernate大约100毫秒,让其他线程完成它们的工作,但是我遇到了另一个问题: 现在,问题是线程Hibernate了100
-
Python硒多线程
我想在选项卡中同时打开和登录5个选项卡,而不会延迟。我尝试过: 但它是: Traceback(最近的最后一次调用):文件"C:\用户\1024983\AppData\本地\程序\Python\Python37\lib\threading.py",第870行,在运行自己。_target(*自己。_args,**自己。_kwargs)文件"C:\用户\1024983\AppData\本地\程序\Pyt
-
DefaultMessageListenerContainer线程问题
它是工作的,因为我的listener类很好地接收消息,但日志看起来很奇怪。开始后,看起来只有一个线程在处理消息,即使队列中有几个线程在等待: 正如您所看到的,最终只有容器#5用于处理所有剩余的消息。消息不是并行处理的,定义的并发性似乎没有被使用。我不知道这是不是完全相同的问题,但我看过这篇文章,但我没有使用ActiveMQ,我没有这个预取选项。 你能解释一下我为什么会有这种行为吗。是弹簧配置错误还
-
多线程Spring Transaction
假设我们进入一个方法并在主线程中启动一个事务。在这个方法中,有一些异步方法,所以我们在这个方法中创建了2个以上的线程; 由于线程2获得异常,我想回滚其他线程完成的所有事务。但是,虽然主线程和线程2拥有的事务可以回滚,但我无法回滚线程1工作。我正在使用Spring/Hibernate,所以你有什么想法来管理这个以及如何应用? 谢谢
-
 地平线一面
地平线一面地平线 算法 一面 50分钟左右 1.项目 2.从项目延申提到,如果是海量数据里,你如何提取困难样本,里面有噪声,如何验证呢,不能使用模型训练 3.讲讲图像分割最新做法有哪些,有哪些优化 4.我自己提到了对比学习,具体问了对比学习的东西 5.手撕:岛屿类问题,矩阵是由0和255组成的 给每一块岛屿标号返回标了号的岛屿 已感谢 #地平线#
-
UAVCAN总线 - UAVCAN Bootloader
translated_page: https://github.com/PX4/Devguide/blob/master/en/uavcan/bootloader_installation.md translated_sha: 95b39d747851dd01c1fe5d36b24e59ec865e323e 安装UAVCAN启动程序 警告: 无人机控制器局域网络(Unmanned Aerial V
-
I2C总线 - SF1XX lidar
本页面向你展示如何去设置一个下面几种类型的激光雷达: SF10/a SF10/b SF10/c SF11/c 硬件驱动仅适合于飞控板上I2C的连接方式。 激光雷达设置 首先通过USB连接传感器(内含USB转串口),运行终端,并按空格键检查I2C地址是否等于0x66。 新版本飞控板已经预先设置为0x66,而老版本设置的0x55地址与 rgbled 模块地址相冲突。 PX4设置 通过 SENS_EN_
-
4. 在线升级
1. 缘由 公司有一个项目,需要用到websocket,所谓websocket是基于tcp/ip的协议,它跟http协议是同等级的。它解决的问题是长轮循的资源消耗问题。也就是用它做类似长轮循的应用时,因为本身协议的支持,资源消耗是较低的。类似的应用可以是聊天室,通知系统,股票实时更新等。具体的我们不再细说。由于我们项目是部署在nginx上的,用的ruby on rails开发的,使用的gem是ac
-
1.2.2.2 线程模型
Envoy使用单个进程多线程体系架构。一个主线程控制各个零散的协作任务,如一些工作线程执行监听、过滤和转发任务。一旦某个连接被一个监听器接受,这个连接将会一直运行在一个工作线程上。这使得大多数Envoy在很大程度上是单线程的(令人尴尬的并行),而在工作线程之间有少量复杂的逻辑处理。通常Envoy是100%非阻塞模式,对于大多数工作负载,我们建议将工作线程的数量配置等同于机器上硬线程的数量。