《青岛鼎信通讯》专题
-
Guzzle挂起通信两个api
在我的应用程序中,有两台laravel 5.2服务器正在运行,它们需要相互交互以使用guzzle获取资源。 在我的服务器1中,我使用League Transformer返回一些数据,但数据需要包含来自服务器2的资源。我使用转换函数中的guzzle获取数据: 当我请求将此资源发送到时,我得到以下响应: 我面临的问题是当我需要使用guzzle从服务器2访问MyModel(存储在服务器1中)时,因为我需
-
arduino与vixen的串行通信
我正在尝试使用arduino通过串行通信从泼妇软件获取传入数据。并将数据移动到其他12个arduino,如果我将泼妇的通道号保留为43,但我需要控制480个通道,它就可以工作。所以第一个arduino控制43个通道,下一个是44-87,依此类推。 这是我的主代码:'ulusetup(){Serial.begin(9600); }}//输出
-
JavaSpring RestControlers通信消息文件
我有一个小任务,设计2个应用程序应用程序1:从用户上传的网络界面文件。此外,用户进行输入,如图书1或图书2等。Iv设法将一个RestController放在一个Spring boot应用程序中,该应用程序接受输入和文件。Iv还设法组装了application2:它处理该文件(将其转换为json文件)并将其发送回用户可以下载的application1(它也是一个像application1一样用jav
-
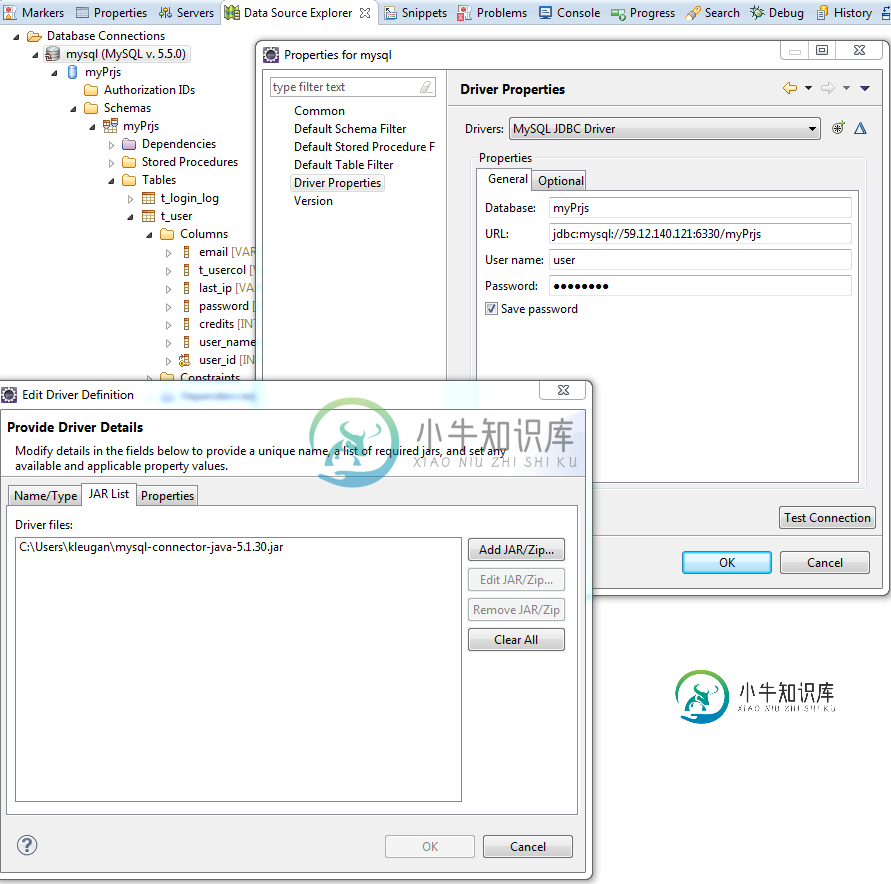 MariaDB CommunicationsException:通信链路故障
MariaDB CommunicationsException:通信链路故障StackOverflow上发布的与通信有关的问题似乎已经够多了。但没有一个能帮我走出困境。 但是,当我试图通过JDBC连接DB服务器时,它仍然失败,出现异常“com.mysql.JDBC.exceptions.jdbc4.CommunicationsException:Communications link Failure”。 测试类如下所示。
-
JFrame与JPanel之间的通信
有什么建议可以让我做到这一点吗?
-
ap.choosePhoneContact 打开系统通信录
ap.choosePhoneContact(CALLBACK) 选择系统通信录中某个联系人的电话。 CALLBACK 参数说明 名称 类型 描述 name String 选中的联系人姓名 mobile String 选中的联系人手机号 错误说明 error 描述 10 没有权限; 11 用户取消操作(或设备未授权使用通讯录) 代码示例 <script src="https://gw.alipayo
-
OCTO-RPC 服务通信框架
随着分布式技术和微服务思想流行,技术公司逐步将服务拆分为独立运行的小模块,提高系统整体的健壮性,加快特性的演进速度。微服务通过定义完善的接口进行交互,解耦系统、敏捷迭代、方便服务治理。RPC是目前微服务最广泛的通信方式。然而,众多团队各自研发具备服务治理功能的RPC通信框架,一方面增加开发成本,消耗人力重复造轮子;另一方面不同序列化协议的RPC服务,无法互相通信,影响可用性。因此,通用的RPC通信
-
处理相互通信(Processes Intercommunication)
流程互通是指流程之间的数据交换。 有必要在进程之间交换数据以开发并行应用程序。 下图显示了多个子进程之间同步的各种通信机制 - 各种沟通机制 在本节中,我们将了解各种通信机制。 机制如下所述 - Queues 队列可以与多进程程序一起使用。 multiprocessing模块的Queue类与Queue.Queue类相似。 因此,可以使用相同的API。 Multiprocessing .Queue为
-
 OCTO-RPC 服务通信框架
OCTO-RPC 服务通信框架对服务开发者, MTransport 屏蔽了底层网络通信细节,从而更专注于业务自身逻辑实现。支持不同语言版本的代码实现, 保持通信协议的一致性,支持服务注册、服务发现、异步通信、负载均衡等丰富的服务治理功能。
-
seata-golang 通信模型详解
一、简介 Java 的世界里,大家广泛使用的一个高性能网络通信框架 netty,很多 RPC 框架都是基于 netty 来实现的。在 golang 的世界里,getty 也是一个类似 netty 的高性能网络通信库。getty 最初由 dubbogo 项目负责人于雨开发,作为底层通信库在 dubbo-go 中使用。随着 dubbo-go 捐献给 apache 基金会,在社区小伙伴的共同努力下,ge
-
第 24 章 与Web API通信
移动技术再加上无所不在的网络,已经完全改变了我们生活的这个世界。如今坐在公园里就可以打理你的银行账户,或者在亚马逊书店搜索你正在阅读的图书的评论,或者查阅Twitter,看看世界上其他公园里的人们都在想些什么。手机只能打电话发短信的时代已经过去,它可以让你随时随地访问世界各地的数据。 虽然用手机浏览器可以访问互联网,但由于屏幕太小,而且速度受到限制,因此使用者会感觉不适。如果能够定制应用,有针对性
-
10.1.3 action 通信实现 B python
3.1.3 action通信自定义action文件调用(Python) 需求: 创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次
-
10.1.2 action 通信实现 A C++
3.1.2 action通信自定义action文件调用A(C++) 需求: 创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就
-
第 2 章 ROS 通信机制
机器人是一种高度复杂的系统性实现,在机器人上可能集成各种传感器(雷达、摄像头、GPS...)以及运动控制实现,为了解耦合,在ROS中每一个功能点都是一个单独的进程,每一个进程都是独立运行的。更确切的讲,ROS是进程(也称为Nodes)的分布式框架。 因为这些进程甚至还可分布于不同主机,不同主机协同工作,从而分散计算压力。不过随之也有一个问题: 不同的进程是如何通信的?也即不同进程间如何实现数据交换
-
 烽火通信面经分享
烽火通信面经分享唯二进入终面的公司,写写面经攒点人品😂 软开(C语言) 一面(15min) 时间比较短 干货不多 面试官给人感觉到点要下班急着结束 会问项目 然后根据项目问一些内容 gcb调试 tcp三次握手 can通信的实现 结构体和联合体的区别 static在C语言中的作用 C语言内存分部 总结:问的不深 答的也不深 但我感觉他是想让你从底层答深一点 所以没报啥希望 但结果通知二面了 二面(35min) 群