
LSTM-对部分序列进行预测

这个问题是我先前提出的问题的继续。
我训练了一个LSTM模型,以预测100个具有3个特征的样本的批次的二进制类(1或0),即:数据的形状为(m,100,3),其中m是批次数。
数据:
[
[[1,2,3],[1,2,3]... 100 sampels],
[[1,2,3],[1,2,3]... 100 sampels],
... avaialble batches in the training data
]
目标:
[
[1]
[0]
...
]
型号代码:
def build_model(num_samples, num_features, is_training):
model = Sequential()
opt = optimizers.Adam(lr=0.0005, beta_1=0.9, beta_2=0.999, epsilon=1e-08, decay=0.0001)
batch_size = None if is_training else 1
stateful = False if is_training else True
first_lstm = LSTM(32, batch_input_shape=(batch_size, num_samples, num_features), return_sequences=True,
activation='tanh', stateful=stateful)
model.add(first_lstm)
model.add(LeakyReLU())
model.add(Dropout(0.2))
model.add(LSTM(16, return_sequences=True, activation='tanh', stateful=stateful))
model.add(Dropout(0.2))
model.add(LeakyReLU())
model.add(LSTM(8, return_sequences=False, activation='tanh', stateful=stateful))
model.add(LeakyReLU())
model.add(Dense(1, activation='sigmoid'))
if is_training:
model.compile(loss='binary_crossentropy', optimizer=opt,
metrics=['accuracy', keras_metrics.precision(), keras_metrics.recall(), f1])
return model
在训练阶段,模型 不是 有状态的。当预测我正在使用 状态 模型时,遍历数据并为每个样本输出概率:
for index, row in data.iterrows():
if index % 100 == 0:
predicting_model.reset_states()
vals = np.array([[row[['a', 'b', 'c']].values]])
prob = predicting_model.predict_on_batch(vals)
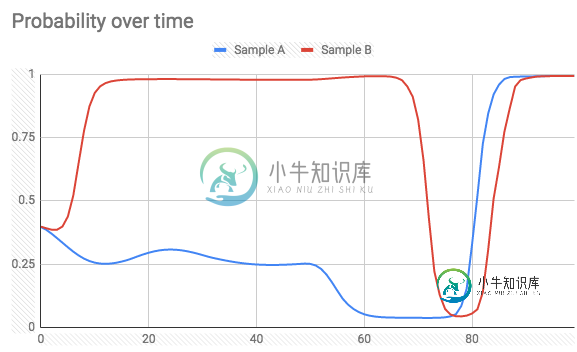
当查看批处理结束时的概率时,它恰好是我对整个批处理进行预测时得到的值(不是一个接一个)。但是,我期望当新样本到达时,概率总是会朝着正确的方向继续。实际发生的情况是,概率输出可能会在任意样本上达到错误的类别(请参见下文)。
在预测时间内(100个样本批次中的两个样本)(标签= 1):
并且Label = 0:
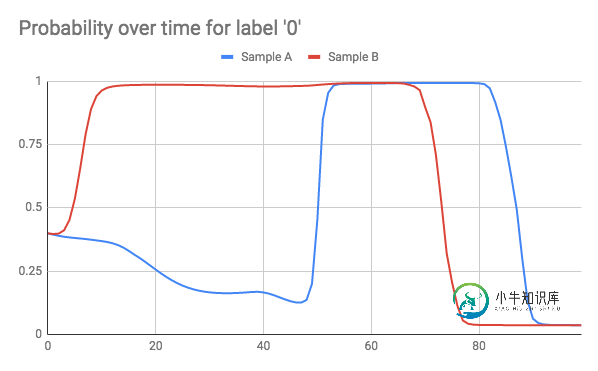
有没有一种方法可以实现我想要的(在预测概率时避免极端的峰值),或者这是给定的事实?
任何解释,建议将不胜感激。
更新
感谢@today的建议,我已经尝试return_sequence=True在最后一个LSTM层上使用每个输入时间步长使用隐藏状态输出来训练网络。
所以现在标签看起来像这样(形状(100,100)):
[[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0]
[1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1]
...]
模型摘要:
Layer (type) Output Shape Param #
=================================================================
lstm_1 (LSTM) (None, 100, 32) 4608
_________________________________________________________________
leaky_re_lu_1 (LeakyReLU) (None, 100, 32) 0
_________________________________________________________________
dropout_1 (Dropout) (None, 100, 32) 0
_________________________________________________________________
lstm_2 (LSTM) (None, 100, 16) 3136
_________________________________________________________________
dropout_2 (Dropout) (None, 100, 16) 0
_________________________________________________________________
leaky_re_lu_2 (LeakyReLU) (None, 100, 16) 0
_________________________________________________________________
lstm_3 (LSTM) (None, 100, 8) 800
_________________________________________________________________
leaky_re_lu_3 (LeakyReLU) (None, 100, 8) 0
_________________________________________________________________
dense_1 (Dense) (None, 100, 1) 9
=================================================================
Total params: 8,553
Trainable params: 8,553
Non-trainable params: 0
_________________________________________________________________
但是,我得到一个例外:
ValueError: Error when checking target: expected dense_1 to have 3 dimensions, but got array with shape (75, 100)
我需要解决什么?
问题答案:
注意:这只是一个想法,可能是错误的。 如果您愿意,请尝试一下,我们将不胜感激。
有没有一种方法可以实现我想要的(在预测概率时避免极端的峰值),或者这是给定的事实?
You can do this experiment : set the return_sequences argument of last
LSTM layer to True and replicate the labels of each sample as much as the
length of each sample. For example if a sample has a length of 100 and its
label is 0, then create a new label for this sample which consists of 100
zeros (you can probably easily do this using numpy function like np.repeat).
Then retrain your new model and test it on new samples afterwards. I am not
sure of this, but I would expect more monotonically increasing/decreasing
probability graphs this time.
更新:
您提到的错误是由标签应为3D数组引起的(请查看模型摘要中最后一层的输出形状)。使用np.expand_dims大小一项的另一轴添加到末尾。假定y_train形状为,重复标签的正确方法如下所示(num_samples,):
rep_y_train = np.repeat(y_train, num_reps).reshape(-1, num_reps, 1)
IMDB数据集上的实验:
实际上,我使用带有一个LSTM层的简单模型尝试了IMDB数据集上建议的实验。一次,我 每个样本 仅使用 一个标签
(就像@Shlomi的原始方法一样),另一次我复制标签以使 样本的每个时间步长 都有 一个标签
(如上所述)。如果您想自己尝试,请参见以下代码:
from keras.layers import *
from keras.models import Sequential, Model
from keras.datasets import imdb
from keras.preprocessing.sequence import pad_sequences
import numpy as np
vocab_size = 10000
max_len = 200
(x_train, y_train), (x_test, y_test) = imdb.load_data(num_words=vocab_size)
X_train = pad_sequences(x_train, maxlen=max_len)
def create_model(return_seq=False, stateful=False):
batch_size = 1 if stateful else None
model = Sequential()
model.add(Embedding(vocab_size, 128, batch_input_shape=(batch_size, None)))
model.add(CuDNNLSTM(64, return_sequences=return_seq, stateful=stateful))
model.add(Dense(1, activation='sigmoid'))
model.compile(optimizer='rmsprop', loss='binary_crossentropy', metrics=['acc'])
return model
# train model with one label per sample
train_model = create_model()
train_model.fit(X_train, y_train, epochs=10, batch_size=128, validation_split=0.3)
# replicate the labels
y_train_rep = np.repeat(y_train, max_len).reshape(-1, max_len, 1)
# train model with one label per timestep
rep_train_model = create_model(True)
rep_train_model.fit(X_train, y_train_rep, epochs=10, batch_size=128, validation_split=0.3)
然后,我们可以创建训练模型的有状态副本,并在一些测试数据上运行它们以比较其结果:
# replica of `train_model` with the same weights
test_model = create_model(False, True)
test_model.set_weights(train_model.get_weights())
test_model.reset_states()
# replica of `rep_train_model` with the same weights
rep_test_model = create_model(True, True)
rep_test_model.set_weights(rep_train_model.get_weights())
rep_test_model.reset_states()
def stateful_predict(model, samples):
preds = []
for s in samples:
model.reset_states()
ps = []
for ts in s:
p = model.predict(np.array([[ts]]))
ps.append(p[0,0])
preds.append(list(ps))
return preds
X_test = pad_sequences(x_test, maxlen=max_len)
实际上,的第一个样本的X_test标签为0(即属于负面类别),而的第二个样本的X_test标签为1(即属于正面类别)。因此,让我们首先看一下test_model这两个样本的状态预测(即,使用每个样本一个标签训练的预测)是什么样的:
import matplotlib.pyplot as plt
preds = stateful_predict(test_model, X_test[0:2])
plt.plot(preds[0])
plt.plot(preds[1])
plt.legend(['Class 0', 'Class 1'])
结果:
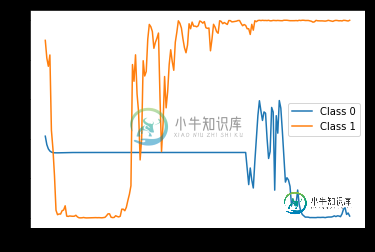
在结束时(即时间步200)正确标记(即概率),但是在之间非常尖峰并且波动。现在,将其与的状态预测rep_test_model(即,每个时间步使用一个标签训练的状态预测)进行比较:
preds = stateful_predict(rep_test_model, X_test[0:2])
plt.plot(preds[0])
plt.plot(preds[1])
plt.legend(['Class 0', 'Class 1'])
结果:

再次,在最后纠正正确的标签预测,但是这与预期的一样,具有更加平滑和单调的趋势。
请注意,这只是一个示例,因此我在这里只使用了一个非常简单的模型,其中只有一个LSTM层,因此我根本没有尝试对其进行调整。我猜想通过对模型进行更好的调整(例如,调整层数,每层中的单元数,使用的激活函数,优化器类型和参数等),您可能会得到更好的结果。
-
我试图使用Keras对多个变量进行同时预测。在这里使用这个例子,我想预测所有特征的值,包括pm 2.5,DEWP,TEMP等,而不仅仅是污染(pm 2.5)。本质上,这是,给定所有变量,建立一个模型来预测所有变量作为时间序列,而不仅仅是预测一个变量。 我使用重塑后的3D数据修改了原始示例代码,但出现了一个错误。代码如下: 输出为: 数据集在这里可用。 我的问题是: Keras LSTM层不是为此设
-
部分排序可以通过std::Partial_sort完成。 部分排序方式 5 7 4 2 8 6 1 9 0 3 在对3个元素进行部分排序之后 0 1 2 7 8 6 5 9 4 3 http://en.cppreference.com/w/cpp/algorithm/partial_sort. 但当某些元素已经排序时,这不是最好的。 还有其他这样的函数可以这样做并利用部分排序数组。
-
当有图像作为数据时,最常用的是CNN。然而,我已经看到CNN有时被用于timeseries。因此,为了解决时间序列分类问题,我分别尝试了LSTM和CNN模型。我的两个模型如下。 LSTM: 美国有线电视新闻网: 我认为LSTM和CNN有其独特的特点,在我的预测中结合这两者会产生更好的结果。然而,我正在努力寻找适合我的问题的合适资源。 有可能为我的问题这样做吗?如果是的话,我怎么做?它会产生更好的结
-
问题内容: 我想知道,流(或收集器)中是否已经有一个已实现的功能,已将列表作为值进行了排序。例如,以下代码均产生按年龄分组的按性别分组的人员清单。第一个解决方案具有一些开销排序(看起来有些sc琐)。第二种解决方案需要对每个人进行两次检查,但是必须做到很好。 首先排序,然后分组为一个流: 首先分组,然后对每个值进行排序: 我只是想知道,是否已经实现了某项功能,该功能可以一次运行,例如。 问题答案:
-
我想知道,流(或收集器)中是否已经实现了将列表排序为值的功能。例如,以下代码均生成按年龄排序的按性别分组的人员列表。第一个解决方案有一些开销排序(看起来有点邋遢)。第二种解决方案需要对每个人进行两次检查,但工作做得很好。 首先排序,然后在一个流中分组: 首先分组,然后对每个值进行排序: 我只是想知道,是否已经实现了一些东西,可以在一次运行中完成,比如。
-
我有一个过程对象列表,如下所示 我的程序课就像 我想基于以下条件对对象进行排序和分组。 应根据过程名称对所有过程进行分组。 过程必须按过程日期降序排列。[日期列表中的第一个元素,即 分组在一起的相同过程应按日期降序排列。 最终结果必须是, 我能够使用比较器和旧的Java代码实现这一点。是否可以使用java8流、收集器和分组来实现相同的功能?